
Question 1
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Understanding the Cylinder Setup
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today we are discussing a clamped cylinder with a variable radius. Can anyone tell me what we mean when we talk about the radius varying linearly?

Does it mean that the radius changes consistently from one end to another?
Exactly, great observation! So, now let’s think about what happens when we apply a torque at the free end. How do we think this will affect the rotation?

I think it will cause the free end to rotate based on how much torque is applied.
That's right! This brings us to a crucial concept called twist, denoted by the variable κ. Remember, κ is the rate of change of rotation of cross-sections. It's essential to understand how torque interacts with twist in our calculations.

What is the relationship between torque and twist?
Good question! Our formula states T(x) = G(x)J(x)κ(x), where G is the shear modulus, J is the polar moment of area. Keep this in mind as it’s vital for solving our problems!
Calculating Torque throughout the Cylinder
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Now, we need to use a free-body diagram to analyze the torques acting at a distance x from the clamped end. Can anyone suggest why we use a free-body diagram?

It helps us visualize the forces and moments, right?
Exactly! After drawing the diagram, we find that T(x) = T, meaning the torque is uniform. Keeping this in mind lets us derive critical equations for our further calculations.
How do we determine the polar moment of area, J?
To find J, we integrate over the area of the cross-section. Each radius will yield a different J value based on its dimensions.
So, if we integrate over a cross-section, it helps us find J at that location?
Correct! Now let's proceed to integrate the twist along the length of the cylinder to find the total rotation.
End-to-End Rotation Calculation
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Once we have the twist calculated, how do we relate it back to the end-to-end rotation?
By integrating the twist along the axis of the cylinder?
Exactly! This integration gives us the total rotation Ω. Importantly, we’ll use the linear relationship for radius to express it at any given section. What are the endpoints of our radius?
From r1 at one end to r2 at the other end!
Right! And we can express the radius at an arbitrary section x by linear interpolation. This method is crucial when calculating specific rotations in various scenarios!
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
The section provides a detailed examination of how to calculate the rotation of a clamped cylinder with a variable radius when a torque is applied at the free end, incorporating important equations and concepts like twist and polar moment of inertia.
Detailed
In this section, we explore the mechanics of a clamped cylinder with a variable cross-section radius. We start by considering a scenario where a torque is applied at the free end of the cylinder, which leads to end-to-end rotation. The relationship between torque and twist, expressed in terms of polar moment of area and shear modulus, is established. Using a free-body diagram, we derive equations that demonstrate how torque remains uniform along the length of the cylinder despite varying cross-sectional dimensions. The section emphasizes calculations of twist and resultant rotation, culminating in applying a linear interpolation method to establish radius variations at any cross-section of the cylinder.
Youtube Videos




Audio Book
Dive deep into the subject with an immersive audiobook experience.
Problem Statement
Chapter 1 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
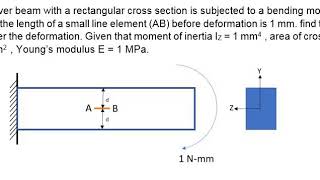
A cylinder with a variable cross section radius is considered as shown in Figure 1. The radius of the cylinder varies linearly from r1 at the clamped end to r2 at the other end. The length of the cylinder is L. A torque T is applied at the free end. How much is the rotation of the cross section at the free end?
Detailed Explanation
This chunk outlines the problem we're trying to solve. We have a cylinder that is clamped at one end and free at the other, with a torque applied. The radius of this cylinder changes gradually along its length. The goal is to determine how much the free end rotates when the torque is applied.
Examples & Analogies
Think of this scenario like twisting a soft rubbery toy at one end while holding the other. If the toy's thickness varies from top to bottom, the amount it twists will depend on how thick it is at any point—just like how the varied radius of the cylinder influences its rotation under torque.
Understanding Torque and Rotation
Chapter 2 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
In the previous lecture, we had derived that the end-to-end rotation Ω is given by equation (1), but it holds only when the cross-section is uniform over the entire length. For the current case, a different form of the above equation is useful as shown below: (2) twist (κ) where κ denotes twist or the rate of change of rotation of the cross section.
Detailed Explanation
In this portion, we recognize that the simple formula for rotation applies only to uniform cylinders. When the cylinder's radius varies, we need to use a different formula that relates the twist across the length of the cylinder. The twist, described by κ, reflects how the cylinder rotates differently at each point along its length.
Examples & Analogies
Picture a spiral staircase. As you move up the stairs, the twists become steeper or shallower depending on the design. Similarly, the twist in our cylinder varies, showing how different sections rotate differently based on their geometry.
Calculating Torque Variation
Chapter 3 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
The variation of T along the axis of the cylinder can be found by making a free body diagram. We cut a section of the cylinder at a distance x from the clamped end. The external torque T acts on the right end of the right section.
Detailed Explanation
Here, we introduce free body diagrams, which help visualize the forces acting on the cylinder. By 'cutting' a section of the cylinder, we can analyze the torques that act at different points. This approach will help us understand how the torque is constant even if the radius changes.
Examples & Analogies
Think of a long, flexible stick. If you apply a force at one end, the tension and torque applied are distributed throughout the stick's length, even if the stick bends. This is similar to how the torque behaves in our cylinder.
Moment Balance and Torque Constancy
Chapter 4 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
This means that the torque at every cross-section is the same and equal to the applied external torque T even though cross-sectional radius is changing. Assuming that the cylinder is made up of a single material, its shear modulus will also be constant, i.e., G(x) = G.
Detailed Explanation
In this chunk, we learn that despite changing cross-sectional areas, the torque remains consistent throughout the length of the cylinder. Additionally, if the cylinder is homogenous (made of the same material), its shear modulus—resistance to deformation—also remains unchanged. This consistency is crucial for our calculations.
Examples & Analogies
Consider a large rubber band stretched evenly across its length. Even if some parts of the band might look thinner than others, the force applied on one end is felt uniformly because the material properties are the same throughout.
Integrating to Find the End-to-End Rotation
Chapter 5 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Using equation (4), the end-to-end rotation can be found by integrating twist along the axis of the cylinder, i.e., (9). As r varies linearly along the axis of the cylinder and r(0)=r1, r(L)=r2, (10).
Detailed Explanation
To compute the total rotation of the cylinder from one end to the other, we need to integrate the twist we calculated over the length of the cylinder. This is where we apply the linear variation of radius to derive the required total rotation across the entire length of the cylinder.
Examples & Analogies
Imagine filling a long tube with different amounts of colored sand at each point; if you then twist the tube, the pattern of colors along the tube will help visualize how each section contributes to the total twist, just as the varying radius contributes to the total rotation in our cylinder.
Key Concepts
-
Torque: The rotational effect of a force applied at a distance from a pivot point.
-
Twist (κ): The rate at which cross-sections of a material twist due to applied torque.
-
Polar Moment of Inertia (J): A critical factor in determining how a cylindrical object will respond to twisting.
-
Shear Modulus (G): This defines the material's response to shear stress.
-
Linear Interpolation: A mathematical method to estimate values from two known data points.
Examples & Applications
Calculating the twist in a cylindrical shaft given the applied torque and variations in radius.
Using the polar moment of inertia to determine how different materials behave under torsional loads.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
When torque is applied with might, the twist will follow, day or night.
Stories
Imagine twisting a rubber band, it stretches and rotates not just in hand, torque flows from end to end, causing twists round the bend.
Memory Tools
To remember the twist equation, think of 'T-G-J-κ' - Torque gives Joyful Kinks!
Acronyms
TGJ for Torque, Shear Modulus, Polar Moment, and Twist.
Flash Cards
Glossary
- Torque
A measure of the rotational force applied on an object.
- Twist
The rate of change of rotation of cross-sections in the context of torsion.
- Polar Moment of Inertia (J)
A measure of an object's resistance to angular deformation.
- Shear Modulus (G)
A measure of a material's ability to resist shear deformation.
- Linear Interpolation
A method to estimate values between two known values.
Reference links
Supplementary resources to enhance your learning experience.