
Apply Stability Criteria, including Routh-Hurwitz, Nyquist, and Bode Plots
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to Stability
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we will discuss stability in control systems. Can anyone tell me why stability is important?

Stability is important because it ensures systems like motors or aircraft can return to normal after disturbances.
Exactly! Stability ensures a system operates effectively and safely. We’ll explore three criteria to assess stability: Routh-Hurwitz, Nyquist, and Bode plots.

What do we mean by 'stability' in this context?
Great question! In control systems, stability means the system can return to equilibrium after being disturbed. Let’s move into our first criterion: Routh-Hurwitz.
Routh-Hurwitz Criterion
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

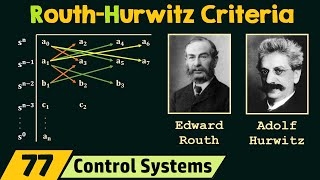
The Routh-Hurwitz Criterion is used to determine stability by checking the poles of the characteristic equation. Let’s go over how we construct the Routh array. Can anyone remember the formula used here?

We start by writing the characteristic equation and filling the first two rows of the Routh array with coefficients.
Correct! The first two rows contain coefficients for even and odd powers. What do we look for next?

We check for sign changes in the first column of the Routh array.
Right! The number of sign changes tells us about poles in the right half plane, indicating stability or instability.
Nyquist Criterion
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Now let’s switch gears to the Nyquist Criterion. Who can summarize what a Nyquist plot does?
The Nyquist plot shows the system’s frequency response, helping us evaluate stability by encirclements around the point -1.
Precisely! If the plot doesn’t encircle -1, the system is stable. What happens with one counter-clockwise encirclement?
That means the system is marginally stable?
Great insight! Remember, clockwise encirclements signify instability. Let’s look at an example to apply this.
Bode Plot Method
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Let's discuss the Bode plot method. Who remembers what a Bode plot consists of?
It consists of a magnitude plot and a phase plot.
Exactly! The magnitude shows gain across frequencies, and the phase shows how phase shift varies. What are gain and phase margins?
Gain margin is how much the system gain can increase before it becomes unstable, and phase margin is the additional phase lag needed for the system to become unstable.
Well done! Understanding gain and phase margins is essential for stability analysis and controller tuning. Let’s apply this with a case study.
Comparing Stability Criteria
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Lastly, let's compare the three criteria. When would you choose Routh-Hurwitz over Nyquist or Bode?
Maybe when we want a quick check on stability without calculating poles?
Or Nyquist when we're analyzing feedback systems?
Exactly! Each criterion has unique advantages, and engineers often combine them for thorough analysis. To summarize, Routh-Hurwitz is simpler, Nyquist focuses on feedback, and Bode is invaluable for performance and tuning.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
Stability in control systems is essential for ensuring systems can maintain desired operations despite disturbances. This section introduces the Routh-Hurwitz Criterion for time-domain analysis of stability, the Nyquist Criterion for frequency-domain stability evaluation, and the Bode plot method for visualizing system performance and stability metrics such as gain and phase margins.
Detailed
Detailed Summary
In control systems, stability refers to the capacity for a system to return to equilibrium after disturbances. This section outlines how stability can be assessed using three key criteria:
- Routh-Hurwitz Criterion
- A method for determining stability through the characteristic equation's poles without explicitly calculating them.
- Constructing a Routh array from the equation coefficients helps identify poles in the right-half plane, indicating instability.
- The number of sign changes in the first column of the Routh array indicates stability.
- Nyquist Criterion
- This frequency-domain method involves plotting the system's frequency response in the complex plane to evaluate stability.
- Encirclements of the -1 point in the Nyquist plot dictate system stability, with no encirclements indicating stability, while certain encirclements indicate marginal or complete instability.
- Bode Plot Method
- The Bode plot consists of magnitude and phase plots showing how system gain and phase shift vary with frequency.
- This method provides insight into gain and phase margins, which are critical for determining stability and performance.
Comparatively, engineers often use a combination of these methods to analyze control systems effectively, ensuring robust and reliable designs.
Youtube Videos



Audio Book
Dive deep into the subject with an immersive audiobook experience.
Introduction to Stability in Control Systems
Chapter 1 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
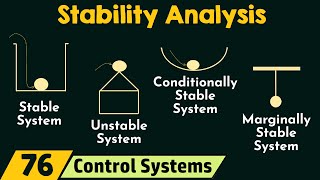
In control systems, stability refers to the ability of a system to return to equilibrium or remain at a desired steady state after being disturbed by an input or external disturbance. Stability is crucial for the reliable operation of systems such as motors, airplanes, industrial processes, and electrical circuits.
For linear time-invariant (LTI) systems, stability can be analyzed in both the time domain and the frequency domain. There are several criteria used to assess the stability of these systems, including:
1. Routh-Hurwitz Criterion (time-domain)
2. Nyquist Criterion (frequency-domain)
3. Bode Plot Method (frequency-domain)
This chapter will explore these methods in detail and explain how to apply them to evaluate system stability.
Detailed Explanation
This chunk introduces the concept of stability in control systems. It explains that stability is the ability of a system to return to its initial state after a disturbance. This is vital for systems such as motors or airplanes where a stable operation is required for safety and reliability. The chunk also presents three main methods to assess stability for linear time-invariant systems: Routh-Hurwitz, Nyquist, and Bode Plot methods, which will be explored in detail later.
Examples & Analogies
Think of a balanced seesaw where children can play. If one side (person) gets up (disturbance), the seesaw will tend to return to balance (equilibrium) after the disturbance is removed. A seesaw that returns to its balanced position is stable, just like a control system designed to maintain stability after being disturbed.
Routh-Hurwitz Criterion
Chapter 2 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
The Routh-Hurwitz Criterion is a time-domain method for determining the stability of a system by examining the location of the poles of its characteristic equation. A system is stable if all poles of its transfer function have negative real parts (i.e., they lie in the left half of the complex plane). The criterion provides a way to check if a system has poles in the right half of the complex plane (which would indicate instability) without solving for the poles explicitly.
Steps to Apply the Routh-Hurwitz Criterion:
1. Write the characteristic equation of the system (usually the denominator of the closed-loop transfer function).
2. Construct the Routh array:
○ The Routh array is constructed from the coefficients of the characteristic polynomial.
○ The first two rows of the array are filled with the coefficients of the even and odd powers of s, respectively.
○ Each subsequent row is calculated using the determinant of the two elements directly above it.
3. Determine the number of sign changes in the first column of the Routh array:
○ The number of sign changes corresponds to the number of poles in the right half-plane.
○ If there are no sign changes, the system is stable.
○ If there are sign changes, the system is unstable.
Detailed Explanation
The Routh-Hurwitz Criterion helps determine if a control system is stable based on the poles of its characteristic equation. By establishing the Routh array from the coefficients of this equation, we can detect the stability of the system without directly calculating the poles. If all entries in the first column of the Routh array do not change sign, the system is stable; if there are sign changes, the system is unstable.
Examples & Analogies
Imagine a game of tug-of-war – if both teams are pulling at equal strength, the rope remains stable. If one team gains too much strength, they pull the other team past a certain line (unstable). Similarly, the Routh-Hurwitz Criterion checks if the 'pull' from each coefficient in the Routh array is balanced for the system to remain stable.
Nyquist Criterion
Chapter 3 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
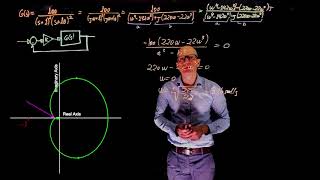
The Nyquist Criterion is a frequency-domain stability criterion used to determine the stability of a feedback system. It involves plotting the Nyquist plot, which is the plot of the system's frequency response G(jω) as ω varies from −∞ to +∞. The criterion helps determine if the closed-loop system will be stable based on the open-loop frequency response.
Nyquist Criterion Steps:
1. Construct the Nyquist plot:
○ Calculate the frequency response G(jω) for various frequencies ω, where ω varies from −∞ to +∞.
○ Plot G(jω) in the complex plane.
2. Count the number of encirclements of the point −1 in the Nyquist plot:
○ The system is stable if the Nyquist plot does not encircle the point −1 in the complex plane.
○ The system is marginally stable if the plot encircles −1 once in a counter-clockwise direction.
○ The system is unstable if the plot encircles −1 in a clockwise direction or does not encircle −1 as needed.
Detailed Explanation
The Nyquist Criterion assesses the stability of feedback systems by analyzing their frequency responses plotted on a Nyquist plot. This method enables engineers to visualize how the system behaves at various frequencies and determine if the system will remain stable when feedback is applied. The crucial step is counting how many times the plot encircles the critical point of -1 on the graph.
Examples & Analogies
Consider a bicycle riding along a winding road. If the bike goes off course (the plot encircles -1), it might become unstable, making it difficult to control. The Nyquist plot acts like the road map, helping us understand if we can keep the bike on track without falling over.
Bode Plot Method
Chapter 4 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
A Bode plot is a graphical method for analyzing the frequency response of a system. It consists of two plots:
1. Magnitude plot: Shows how the gain of the system varies with frequency.
2. Phase plot: Shows how the phase shift of the system varies with frequency.
The Bode plot method can be used to assess the stability and performance of the system, particularly the gain margin and phase margin.
Bode Plot Steps:
1. Plot the Magnitude Response:
○ The magnitude of the transfer function |G(jω)| is plotted on a logarithmic scale against frequency ω.
2. Plot the Phase Response:
○ The phase of the transfer function arg (G(jω)) is plotted on a logarithmic scale against frequency ω.
3. Identify the Gain Margin and Phase Margin:
○ Gain Margin: The amount by which the system’s gain can be increased before the system becomes unstable. It is found by determining the gain at the frequency where the phase is −180°.
○ Phase Margin: The additional phase lag required to bring the system to instability. It is found by determining the phase at the frequency where the magnitude is 1 (0 dB).
Detailed Explanation
The Bode Plot Method is used to visualize a system's frequency response through two plots: one for magnitude and one for phase. The magnitude plot demonstrates how the output gain varies with changing frequencies, while the phase plot illustrates how the phase angle adjusts. By analyzing the gain and phase margins, engineers can assess how close the system is to instability, enabling finer controller tuning.
Examples & Analogies
Think of tuning a musical instrument. Just like a guitarist adjusts string tension (gain) and positioning (phase) to achieve the right sound, engineers tune control systems to ensure they maintain stability while performing optimally throughout a range of frequencies.
Comparing Stability Criteria
Chapter 5 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Each stability criterion provides valuable insights into system behavior:
● Routh-Hurwitz: Works directly with the characteristic equation and is very effective for determining stability without having to solve for the poles.
● Nyquist: Useful for analyzing closed-loop systems, particularly when you are concerned with the effects of feedback on stability.
● Bode Plot: Ideal for frequency-domain analysis and provides a direct way to visualize the system's gain and phase at various frequencies, making it useful for tuning controllers.
In many cases, engineers will use a combination of these methods to analyze system stability from different perspectives.
Detailed Explanation
This chunk compares the three stability criteria, highlighting the unique advantages of each. The Routh-Hurwitz Criterion focuses on the characteristic equation, Nyquist deals with feedback systems, and Bode is best for visualizing frequency responses. Engineers often use these methods complementarily to gain a comprehensive understanding of system stability.
Examples & Analogies
It's like cooking – different recipes favor various techniques. Some dishes are best baked (Routh-Hurwitz), while others might need simmering (Nyquist), and some require microwave heating (Bode Plot). By combining these techniques, you can create a complete meal, just as engineers combine methods for stability analysis.
Key Concepts
-
Characteristic Equation: The equation derived from the denominator of the closed-loop transfer function, where poles are assessed.
-
Right-half Plane: Refers to the area in the complex plane where poles can indicate instability.
-
Encirclements of -1: A measure in Nyquist plots for determining system stability.
-
Magnitude and Phase Plots: Key components of Bode plots used to evaluate system response across frequencies.
Examples & Applications
Example of constructing the Routh array from a characteristic equation: For s^4 + 3s^3 + 5s^2 + 2s + 6 = 0, we fill in the array to analyze stability.
Example of analyzing a Nyquist plot for a system: G(s) = K/(s(s+1)(s+2)), ensuring we assess the encirclements of -1.
Example of using a Bode plot for G(s) = 10/(s^2 + 2s + 10) to find gain margin and phase margin.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
For stability that's fair and clear, Routh-Hurwitz will steer us near.
Stories
Imagine a ship (the system) trying to navigate through stormy seas (disturbances). A stable ship gently returns to the harbor (equilibrium) after swaying, just like a stable system regains balance after disruptions.
Memory Tools
Remember 'RNB' for Routh, Nyquist, and Bode: three keys to unlock stability's code.
Acronyms
RNB - Routh, Nyquist, Bode for assessing stability.
Flash Cards
Glossary
- Stability
The ability of a system to return to equilibrium after a disturbance.
- RouthHurwitz Criterion
A method to determine system stability based on the characteristic polynomial's sign changes.
- Nyquist Criterion
A stability assessment method using the Nyquist plot of a system's frequency response.
- Bode Plot
A graphical representation of a system's frequency response, consisting of magnitude and phase plots.
- Gain Margin
The extent to which the system gain can increase before instability occurs.
- Phase Margin
The additional phase lag required for a system to become unstable.
Reference links
Supplementary resources to enhance your learning experience.