
In-Depth Task Management and Advanced Scheduling Algorithms
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to Task Control Block (TCB)
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we'll discuss the Task Control Block or TCB. Each task in an RTOS has a dedicated TCB that stores important information such as its ID, state, priority, and stack details. Who can explain why the TCB is so vital?

I think it tracks the state of the tasks and helps the operating system manage them.
Exactly! It acts like a passport for tasks. Each TCB contains the task's current state. Can anyone name the possible states a task can take?

A task can be Dormant, Ready, Running, or Blocked.
Correct! These states are essential for task management. Remember the acronym D-R-R-B for Dormant, Ready, Running, and Blocked. Now, how is the priority of a task relevant in an RTOS?

Higher-priority tasks get executed first, right?
Exactly! Higher priority means faster response time in critical applications. Well done! Let's summarize: the TCB holds vital task information, including the state and priority, enabling effective task scheduling.
RTOS Scheduler and Context Switching
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Next, let’s explore the RTOS Scheduler's role in task management. Can anyone tell me what the scheduler is responsible for?

The scheduler decides which task gets the CPU next!
Well said! The core job of the scheduler is to ensure the highest-priority ready task runs on the CPU. How does context switching fit into this?
It's how the scheduler switches from one task to another, saving the current task's context and restoring the next one’s.
Right again! This is crucial because it allows multitasking. Can anyone provide an example of when context switching might happen in an RTOS?
It happens when a higher-priority task becomes ready and interrupts a currently running task.
Exactly! This ensures that critical tasks are executed without delay. Let's recap: the scheduler governs task execution based on priority, while context switching allows efficient multitasking.
Scheduling Algorithms and Their Importance
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Now, let's dive into scheduling algorithms. We have Preemptive and Non-Preemptive scheduling. What do you think the main difference is?
In Preemptive scheduling, higher-priority tasks can interrupt others, while in Non-Preemptive, tasks have to finish before yielding.
Excellent distinction! Can anyone describe when you might prefer one scheduling type over the other?
Preemptive is better for real-time applications where deadlines matter, while Non-Preemptive is simpler for less critical tasks.
Great insights! Remember this: preemptive scheduling ensures responsiveness, but at the cost of additional complexity in managing shared resources. Now, can anyone briefly explain Rate Monotonic Scheduling?
It's a static priority scheduling algorithm where tasks with shorter execution intervals have higher priority.
Exactly! And it’s optimal for periodic tasks! Let's summarize today's discussion: scheduling algorithms dictate task execution styles and have significant impact on system responsiveness.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
The module elaborates on how RTOS efficiently handles task management, emphasizing concepts like the Task Control Block (TCB), scheduling principles, and context switching processes. It explores both preemptive and non-preemptive scheduling techniques, highlighting their advantages, disadvantages, and real-world applications in embedded systems.
Detailed
In-Depth Task Management and Advanced Scheduling Algorithms
This section focuses on the comprehensive task management capabilities provided by Real-Time Operating Systems (RTOS) to manage complex embedded applications. Effective task management is crucial in ensuring timely and deterministic responses to events. Here are the key elements covered:
1. Task Control Block (TCB)
- Definition: The TCB is a critical data structure containing all pertinent information about a task, acting as its identity card within RTOS. This includes:
- Task ID, current state, priority, stack information, and saved CPU registers.
- Functionality: Helps the RTOS manage task states and transitions efficiently.
2. Task Creation and Deletion
- Functions such as
xTaskCreate()andvTaskDelete()are critical for dynamically managing tasks. Proper API calls ensure efficient memory management and resource cleanup.
3. RTOS Scheduler
- Role: Central to RTOS, it determines which task gains CPU access. Enhances concurrent task execution while ensuring the highest-priority ready task executes seamlessly.
- Context Switching: Critical for multitasking where the state of tasks is shifted back and forth. This must be optimized for speed and predictability to maintain real-time guarantees.
4. Scheduling Algorithms
- Preemptive Scheduling: Allows higher-priority tasks to interrupt lower-priority ones, ensuring responsiveness.
- Non-Preemptive Scheduling: Tasks run until voluntarily yielding control. Simpler but can lead to poor responsiveness for critical tasks.
- Key Real-Time Scheduling Algorithms:
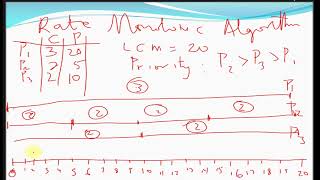
- Rate Monotonic Scheduling (RMS): Assigns priorities based on task frequencies. Optimal for periodic tasks.
- Earliest Deadline First (EDF): Dynamic priority assignment based on upcoming deadlines. Highly efficient.
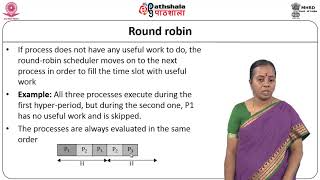
- Round-Robin Scheduling: Fair time-slicing among tasks of the same priority.
Understanding these aspects is essential for designing and implementing effective embedded systems utilizing RTOS, ensuring they meet stringent deadlines and operate reliably in critical environments.
Youtube Videos



Audio Book
Dive deep into the subject with an immersive audiobook experience.
Detailed Task Management within the RTOS Framework
Chapter 1 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Effective task management is central to an RTOS's ability to handle complex embedded applications.
Detailed Explanation
Task management in an RTOS is essential for ensuring that multiple tasks can be executed efficiently and effectively. Each task is represented by a data structure called the Task Control Block (TCB). The TCB contains information unique to each task, like its state (whether it's ready, running, or blocked), priority level, and the stack space dedicated to that task. This allows the RTOS to manage tasks effectively, switching between them as needed.
Examples & Analogies
Think of the RTOS as a busy restaurant. Each task is like a customer ordering food. The restaurant staff (the scheduler) must prioritize orders (tasks) based on urgency and importance. Each customer has a unique order (TCB) that specifies their meal (states, priority, etc.). Just like the restaurant staff need to manage their time and resources to ensure all customers are served appropriately, the RTOS needs to manage task execution efficiently.
The RTOS Scheduler
Chapter 2 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
The scheduler is the fundamental component of the RTOS kernel, solely responsible for deciding which task gains access to the CPU at any given moment.
Detailed Explanation
The RTOS scheduler determines which task should run at any point in time, based on their priority and state. It ensures that, among all the tasks that are ready, the most important (high-priority) task executes first. The process of switching from one task to another is known as context switching, which involves saving the state of the currently running task and restoring the state of the next task. This needs to be efficient, as each switch incurs some overhead.
Examples & Analogies
Imagine a traffic light that manages traffic flow. The light changes colors to prioritize which direction gets to go first (the high-priority tasks get to 'go'). Just like the scheduler decides which task to run based on importance and readiness, the traffic light allows cars to proceed based on which direction is busy and requires immediate access.
Preemptive and Non-Preemptive Scheduling
Chapter 3 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Preemptive Scheduling allows for higher-priority tasks to interrupt (preempt) lower-priority tasks, while Non-Preemptive (Cooperative) Scheduling requires tasks to yield voluntarily.
Detailed Explanation
Preemptive scheduling is critical in an RTOS because it enables higher-priority tasks to interrupt lower-priority ones immediately. This ensures that the most time-sensitive tasks get the CPU resources they need without delay. In contrast, non-preemptive scheduling offers simplicity, as a task must run until it voluntarily gives up control, which can lead to issues if a low-priority task doesn't yield, potentially missing deadlines for critical tasks.
Examples & Analogies
Think of preemptive scheduling like a game of soccer where the referee can stop play to enforce the rules (allowing a high-priority event to happen). Non-preemptive scheduling is akin to a game where players are required to finish their turn completely before allowing the next player to take their turn, potentially causing delays if someone takes too long.
Key Real-Time Scheduling Algorithms
Chapter 4 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Understanding specific scheduling algorithms like Rate Monotonic Scheduling (RMS) and Earliest Deadline First (EDF) helps ensure deadlines are met.
Detailed Explanation
RMS is a static priority algorithm where tasks with shorter execution cycles receive higher priorities, while EDF dynamically assigns priorities based on the closest deadline. RMS is optimal for periodic tasks and guarantees that deadlines will be met as long as the processor utilization remains below a certain threshold. EDF allows for more flexible scheduling, potentially achieving higher CPU utilization as it prioritizes tasks based on their absolute deadlines, not just their static properties.
Examples & Analogies
Consider RMS as a school class where students (tasks) are given turns based on how often they need to speak. The student who needs to speak most often (shortest execution time) gets to go first. Conversely, EDF is like group work where the person whose project is due earliest gets to present first, regardless of how often they speak, allowing timely completion to take precedence.
Key Concepts
-
Task Control Block (TCB): Holds essential task information for an RTOS.
-
Scheduler: Manages which task runs on the CPU at any moment.
-
Context Switching: Enables multitasking by allowing the CPU to switch between tasks.
-
Preemptive Scheduling: Higher-priority tasks can interrupt currently running tasks.
-
Non-Preemptive Scheduling: Tasks run to completion before yielding control.
-
Rate Monotonic Scheduling (RMS): Static priority scheduling for periodic tasks.
-
Earliest Deadline First (EDF): Dynamic priority scheduling based on deadlines.
Examples & Applications
A TCB for a temperature sensor task might store its task state, priority, and unique identifier to manage its execution efficiently.
In a medical device like a pacemaker, preemptive scheduling ensures that critical tasks are executed immediately to maintain patient safety.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
Tasks with a TCB, stored data we need to see. States like Ready, Dormant, Blocked too, help us know what the tasks can do.
Stories
Imagine a manager, the Scheduler, who always knows which employee task must work next based on urgency, ensuring deadlines are met swiftly.
Memory Tools
Remember D-R-R-B for task states: Dormant, Ready, Running, Blocked.
Acronyms
Use P-N-ED for remembering scheduling
Preemptive
Non-Preemptive
Earliest Deadline.
Flash Cards
Glossary
- Task Control Block (TCB)
A data structure in an RTOS that contains all necessary information about a task, including its state and priority.
- Scheduler
The component of an RTOS responsible for managing task execution and CPU allocation.
- Context Switching
The process of saving the state of a currently running task and restoring the state of another task to enable multitasking.
- Preemptive Scheduling
A scheduling technique where a higher-priority task can interrupt a currently running lower-priority task.
- NonPreemptive Scheduling
A scheduling technique where tasks run until completion or voluntarily yield control without interruption.
- Rate Monotonic Scheduling (RMS)
A static priority scheduling algorithm that assigns higher priority to tasks with shorter execution times.
- Earliest Deadline First (EDF)
A dynamic priority scheduling algorithm that assigns higher priority to the task with the nearest deadline.
Reference links
Supplementary resources to enhance your learning experience.