
Module VI: Introduction to 3D Rigid Body Motion
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Angular Velocity Vector in 3D Motion
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

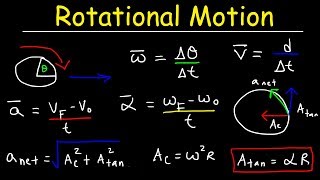
Today, we’ll discuss the concept of angular velocity in 3D rigid body motion. Unlike in 2D, angular velocity is a vector represented as ω⃗ = ω_x î + ω_y ĵ + ω_z k̂. This captures its instantaneous rotation axis.

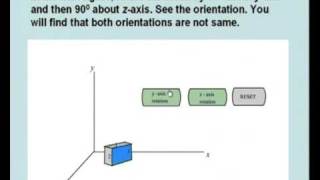
So, does this mean we can rotate objects around any axis in 3D?
Exactly! In 2D motion, we only rotate around a fixed axis, but in 3D, the rotation can be around any axis.

What happens if the angular velocity changes?
Good question! When angular velocity changes, we introduce angular acceleration, α⃗, defined as dω⃗/dt. What can you infer about the relationship between these two vectors?

Maybe they can point in different directions?
Yes! In 3D, α⃗ is not necessarily parallel to ω⃗, leading to complex behaviors like precession.

So, does that mean we have different types of motion happening?
Exactly! This complexity leads to phenomena that aren't seen in simple 2D formulations.
To summarize, in 3D, angular velocity is represented as a vector, and the angular acceleration can change in orientation, which leads to interesting motion dynamics.
Moment of Inertia Tensor
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Let’s now discuss the moment of inertia. In 2D, we treat it as a scalar, but in 3D, it becomes a second-order tensor represented as a 3x3 matrix.
Why do we need a tensor? What’s its significance?
A tensor allows us to account for the distribution of mass and how it's oriented relative to the rotation axis. This gives us more precise control over motion dynamics.
What about the angular momentum then?
Excellent point! Angular momentum in 3D is given by L⃗ = I⋅ω⃗, where I is the inertia tensor. And unlike 2D, the angular momentum isn’t necessarily aligned with the angular velocity.
Does that affect how we compute these quantities?
Yes, it definitely adds complexity. We must consider the tensor’s properties, especially for asymmetric bodies or those not rotating about principal axes.
Wow, that's a lot of dynamics to consider!
Indeed. The complexity leads to fascinating behaviors, such as in gyroscopes or satellites.
In summary, the moment of inertia in 3D is a tensor that helps us understand angular dynamics in a much more complex but accurate way.
Conical Motion Example
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Now, let's look at the example of a rod executing conical motion. This will help illustrate the concepts we've discussed.
How does the rod’s motion look like?
The rod rotates with its axis tracing out a cone, but each point on the rod moves in a plane, appearing 2D. However, the rod's axis changes direction, showcasing 3D dynamics.
Can you explain why the 2D formulation fails here?
Of course! In 2D, we can't define a single scalar ω or a scalar moment of inertia. The angular momentum direction changes over time, requiring a vector and tensor treatment.
Do we need to apply Euler’s equations for this motion?
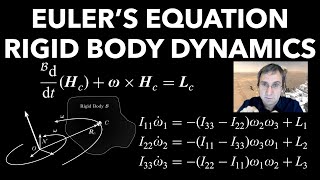
Exactly! This example necessitates using angular momentum's tensor form and Euler's equations for accurate description and analysis.
That’s quite different from rolling a wheel!
Indeed! In 2D, we had a fixed rotational axis. In 3D, it's all about arbitrary axes and a complete understanding to analyze motion accurately.
To summarize, conical motion of a rod illustrates the challenges we face in 3D rigid body dynamics, revealing the complexity of angular momentum and inertia tensor usage.
Comparing 2D and 3D Dynamics
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Let’s compare the key differences between 2D and 3D rigid body motion, focusing on the three main aspects we've covered.
We have angular velocity and moment of inertia, right?
Exactly! In 2D, angular velocity is a scalar whereas in 3D, it's a vector, leading to more complex rotational behavior.
And moment of inertia?
In 2D, it’s scalar while in 3D, it’s a tensor. This allows for the consideration of how mass is distributed in relation to various axes of rotation.
How about angular momentum?
In 2D, L⃗ is parallel to ω⃗, whereas in 3D, it can be non-parallel, leading to fascinating dynamics like tumbling and gyroscopic motion.
So, we really have to dive deeper into 3D dynamics!
Absolutely! Understanding these differences opens up a wider range of applications, from simple objects to complex satellites in motion.
In summary, contrasting 2D versus 3D motion highlights the complexity and depth of rigid body dynamics in our study.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
In 3D rigid body motion, rotation can occur around arbitrary axes, making angular velocity a vector and introducing the moment of inertia tensor. This section discusses the implications of these concepts through examples like conical motion and differences from 2D motion.
Detailed
In 3D rigid body motion, as opposed to 2D, rotation is not limited to a fixed axis. The angular velocity becomes a vector quantity, represented as ω⃗ = ω_x î + ω_y ĵ + ω_z k̂, highlighting its instantaneous axis of rotation. Angular acceleration, α⃗, is defined as dω⃗/dt, which can differ in orientation from ω⃗, resulting in phenomena like precession and nutation. Unlike in 2D, where the moment of inertia is scalar (τ = Iα), in 3D, it becomes a second-order tensor, allowing for complex dynamics in motion described by L⃗ = I⋅ω⃗. An example illustrating this complexity is a rod executing conical motion, where despite appearing to move in a 2D plane at any instance, the axis of rotation is not fixed. This necessitates a full vector and tensor approach, alongside Euler’s equations, to accurately describe the motion, which significantly contrasts with simpler 2D formulations.
Youtube Videos

Audio Book
Dive deep into the subject with an immersive audiobook experience.
Overview of 3D Rigid Body Motion
Chapter 1 of 7
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
In 2D rigid body motion (as covered in Module V), rotation is about a fixed axis (usually z^hat{z}) and can be described by a scalar angular velocity ω. In 3D, however, the motion becomes more complex:
- Rotation can occur about an arbitrary axis
- Angular velocity becomes a vector
- Inertia depends not just on magnitude but also orientation: it is represented by a tensor
Detailed Explanation
In 2D rigid body motion, objects rotate around a fixed point or axis, like a door that swings open around its hinges. The rotation can be described using a single number, known as the scalar angular velocity, which gives the speed of rotation. However, in 3D motion, things get more complicated. Objects can rotate around any axis, not just one that is fixed. This means that angular velocity, which tells us how fast and in what direction the object is rotating, must be represented as a vector, which includes not just speed but also the direction of the rotation. Furthermore, the way mass distributes around the object becomes influential as well, which is captured using a mathematical structure called a tensor.
Examples & Analogies
Imagine the wheels of a car. When the car moves forward, the wheels spin about their centers, a simple fixed-axis rotation (2D). Now, think of a drone that doesn't just spin around a fixed axis but can tilt and roll in any direction while flying (3D). The angular velocity and moment of inertia change based on how the drone is oriented, making it more complex than just the wheels on a car.
Angular Velocity Vector and Its Rate of Change
Chapter 2 of 7
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Angular Velocity Vector ω⃗
- In 3D, rotation occurs about a general axis.
- Angular velocity is a vector quantity:
ω⃗=ωxi^+ωyj^+ωzk^ - Describes the instantaneous axis of rotation.
Rate of Change: Angular Acceleration α⃗
- Defined as:
α⃗=dω⃗dt - In 3D, α⃗ is not necessarily parallel to ω⃗
○ This leads to phenomena like precession and nutation.
Detailed Explanation
The angular velocity vector represents how fast an object rotates and around which axis. In 3D, it is represented using three components: ωx for the x-axis, ωy for the y-axis, and ωz for the z-axis. This allows us to describe not only how fast the object is spinning, but also the specific direction in which it is spinning. Angular acceleration, represented as a vector (α), tells us how the angular velocity is changing over time. Unlike in 2D motion where we have a single angle, in 3D, angular acceleration can point in a different direction compared to angular velocity. This is crucial for understanding complex motions, such as how a spinning top wobbles or precesses as it spins.
Examples & Analogies
Think of a child on a swing. As they swing back and forth, the acceleration they experience changes direction as they move. In a similar way, when something spins in 3D, it can change its direction of rotation, leading to unexpected behaviors like a spinning top that wobbles as it spins due to these forces acting on it.
Moment of Inertia Tensor
Chapter 3 of 7
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Moment of Inertia Tensor I
- In 2D, moment of inertia is a scalar:
τ=Iα - In 3D, it's a second-order tensor (3×3 matrix):
L⃗=I⋅ω
e - L⃗: Angular momentum vector
- I: Inertia tensor depends on mass distribution and axis orientation
- The tensor form:
Iij=∑kmk(δijrk2−rkirkj) - Off-diagonal terms (products of inertia) become significant for asymmetric bodies or rotations not aligned with principal axes.
Detailed Explanation
The moment of inertia is a property that describes how mass is distributed in an object and how difficult it is to change its rotational motion. In 2D, this is a simple number (scalar), but in 3D, it transforms into a tensor. This means we have to consider both the amount of mass and how that mass is arranged relative to the axis of rotation. The tensor, a 3x3 matrix, captures both the inertia about the axes as well as the interaction between different axes through off-diagonal terms. Understanding this helps in analyzing how different shapes respond to rotational forces.
Examples & Analogies
Imagine trying to spin a figure skater. If they pull their arms in, they can spin faster due to a smaller moment of inertia. If they extend their arms, it’s harder to turn, demonstrating how the distribution of mass affects their motion. In a complex object like a satellite, that mass distribution changes based on its shape and orientation, significantly affecting how it rotates through space.
Key Insights and Comparison with 2D Motion
Chapter 4 of 7
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Key Insight
- In 2D: L⃗∥ω⃗
- In 3D: L⃗∦ω⃗ in general
- This leads to non-trivial dynamics such as tumbling of satellites, gyroscopic motion, etc.
Detailed Explanation
In simpler 2D motion, angular momentum (L) is always aligned with the angular velocity vector (ω) — this means they point in the same direction. However, in 3D motion, this relationship does not hold true; L can point in a completely different direction than ω. This can lead to complicated dynamics and behaviors, like how a spinning gyroscope maintains its position, or how satellites can wobble or tumble at unpredictable rates in orbit.
Examples & Analogies
Think of a basketball spinning on your fingertip (gyroscopic motion). The axis of the spin remains relatively stable, but if you apply a force, it may tilt and change direction, showcasing how different kinds of motion can arise from the same initial actions of rotation.
Example: Rod Executing Conical Motion
Chapter 5 of 7
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Example: Rod Executing Conical Motion
- A uniform rigid rod rotates such that its axis traces out a cone.
- The center of mass is fixed, but the rod rotates around it.
- This motion is called conical motion or free symmetric top.
Detailed Explanation
Consider a rod fixed at one end; if it rotates so that the axis of the rod traces out a cone shape, we observe a motion known as conical motion. While each point along the rod moves in a circular manner, creating a 2D projection, the overall movement is a complex 3D motion since the axis of rotation itself is changing direction dynamically.
Examples & Analogies
Picture a lasso being spun around as a cowboy lassoing a calf. Even though the rope describes circles in the air, the point of attachment to the cowboy creates a conical shape as it’s being swung around. This helps in visualizing how a seemingly simple motion results in fascinating dynamics when applied in three dimensions.
Why 2D Formulation Fails
Chapter 6 of 7
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Why 2D Formulation Fails
- Cannot use a single scalar ω — rotation axis is not fixed
- Cannot use scalar moment of inertia I — angular momentum changes direction over time
- Requires full vector and tensor treatment:
L⃗=I⋅ω
and dL⃗dt=τ⃗ - Euler’s equations (in 3D) become necessary.
Detailed Explanation
In 2D physics, using a scalar for angular velocity is sufficient because the axis remains fixed. However, in 3D dynamics, the rotation can occur around any axis, leading to a need for a vector representation of angular velocity. Additionally, moment of inertia cannot be reduced to a scalar; rather it incorporates how mass behaves in various orientations. This necessitates the use of vectors and tensors in calculations, including the application of Euler's equations that account for variable rotation directions during motion.
Examples & Analogies
Imagine trying to describe the motion of a spinning top using a single scalar number. It won't work because the top wobbles and changes direction as it spins. Just like using different tools to fix varied problems, in 3D motion, we need the right mathematical tools (vectors and tensors) to understand what's happening.
Conclusion & Summary
Chapter 7 of 7
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Conclusion & Summary
| Concept | 2D Motion | 3D Motion |
|---|---|---|
| Angular velocity | Scalar ω | Vector ω⃗ |
| Moment of inertia | Scalar I | Tensor I |
| Angular momentum | L⃗=Iω⃗ | L⃗=I⋅ω |
| e, not parallel | ||
| Applicability | Fixed-axis rotation | Arbitrary rotation axes, full generality |
| Example | Rolling wheel | Conical motion of rod, gyroscope, spinning satellites |
Detailed Explanation
This section sums up the major differences between 2D and 3D motion. In 2D, we deal with simpler concepts where both angular velocity and moment of inertia are scalars. In 3D, the angular velocity and moment of inertia are vectors and tensors respectively, changing how angular momentum behaves as they do not necessarily align. The applicability and examples provided highlight the broader range of motions and behaviors we must consider in three dimensions versus the simplicity found in two dimensions.
Examples & Analogies
To visualize this summary, consider driving a car in a straight line (2D motion) versus flying a drone where you can move in all spatial directions (3D). The complexities of 3D motion involve various factors that wouldn’t apply in a simple straight-path scenario.
Key Concepts
-
Angular Velocity Vector: In 3D, it is a vector quantity, capturing the instantaneous axis of rotation.
-
Moment of Inertia Tensor: In 3D, it is represented as a 3x3 matrix that accounts for mass distribution and rotational axes.
-
Angular Momentum: In 3D, it is given by L⃗ = I⋅ω⃗, where L is not necessarily parallel to ω.
-
Complex Motion: In 3D rigid body dynamics, phenomena like precession can occur due to non-parallel angular acceleration.
Examples & Applications
A uniform rigid rod rotating around a fixed point, tracing out a conical motion.
The motion of a gyroscope, where its axis of rotation alters direction over time.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
In 3D space, we twist and turn, angular velocity is what we learn.
Stories
Imagine a cat doing spins in mid-air, its rotation changing with flair; that’s how 3D motions bare.
Memory Tools
VAM - Velocity (as a vector), Angular (acceleration changes), Moment (is a tensor).
Acronyms
CAMP - Complex (dynamics), Angular (momentum), Moment (of inertia), Precession.
Flash Cards
Glossary
- Angular Velocity
A vector quantity that represents the rate of rotation around an axis in 3D motion.
- Angular Acceleration
The rate of change of angular velocity, represented as dω⃗/dt.
- Moment of Inertia Tensor
A 3x3 matrix representing the distribution of mass concerning the axes of rotation in 3D.
- Angular Momentum
The vector quantity representing the product of the moment of inertia and angular velocity in 3D.
- Precession
The phenomenon where the axis of a spinning object moves in a cone due to external torques.
Reference links
Supplementary resources to enhance your learning experience.