
Classification of Sensors
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to Sensor Types
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we'll discuss different types of sensors based on the quantities they measure. Can anyone tell me what categories we might cover?

Are there sensors for measuring position and velocity?
Absolutely! We have position sensors like potentiometers, and velocity sensors like tachometers. These help robots know where they are and how fast they're moving. Remember the acronym 'PVCATVP' as a mnemonic to recall Position, Velocity, Acceleration, Torque, and Vision sensors.

What about the other types?
Great question! We also categorize sensors by what they measure—acceleration, force, temperature, proximity, and vision. Each type plays a unique role in robotic systems.

How do these sensors actually help us?
Think of them as the senses of a robot, providing vital information about its environment, which is crucial for decision-making.

So, they are like human senses?
Exactly! Just as our senses help us navigate, sensors guide robots. To recap, today we discussed the classifications of sensors based on the measured quantity, which are essential for the operation of robots.
Contact vs. Non-contact Sensors
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Now let’s dive deeper into how sensors can be categorized based on their contact type. Who can tell me the difference?
Contact sensors need to touch something, while non-contact ones do not?
Right on! Contact sensors like bump sensors detect physical contact, while non-contact sensors, such as ultrasonic sensors, work without touching the object. We can summarize this with the phrase 'Touch or No Touch.'
Can we use both types in the same system?
Absolutely! Both can complement each other to enhance robot functionality. For example, non-contact sensors can act as barriers while contact sensors can confirm actions.
What's better in certain situations?
Non-contact sensors are great for sensitive tasks where touching could cause damage. Contact sensors are useful for definite actions needing confirmation. Remember, 'Different tasks, different sensors!'
Thanks, that's helpful!
Let’s summarize: Different sensors have different purposes and knowing when to use contact vs. non-contact is key for effective robotics.
Analog vs. Digital Sensors
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Next, let's classify sensors based on the output signal they generate. Does anyone know the difference between analog and digital sensors?
Analog sensors provide continuous signals, right?
Correct! They give a range of values, like temperature over time. In contrast, digital sensors provide discrete signals, typically binary outputs, like on/off states.
So, analog sensors can offer more information?
Yes! Analog sensors are more nuanced, while digital sensors offer clarity in decision points. A good way to remember is 'Analog is Fluid, Digital is Strict.'
When would we prefer one type over the other?
For precise readings, you’d use analog. For simple on/off control, digital is ideal. Both types of sensors find their places in robotics, depending on the application's demands.
Got it! So they are both important!
Exactly! We need the right type for the right situation. In summary, we have analog and digital sensors, both having unique advantages that aid robotic systems.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
The classification of sensors is essential in understanding their roles in robotic systems. This section outlines various categories of sensors, including those based on the physical quantity they measure, whether they require contact with the object, and the type of signal they produce.
Detailed
Classification of Sensors
In robotic systems, sensors are crucial as they detect physical parameters and convert them into measurable signals. This section breaks down sensors into three primary classifications:
8.1.1 Based on Measured Quantity:
- Position Sensors (e.g., potentiometers, rotary encoders) detect location.
- Velocity Sensors (e.g., tachometers, optical encoders) measure speed.
- Acceleration Sensors (e.g., accelerometers) measure change in velocity.
- Force/Torque Sensors (e.g., strain gauge) quantify force applied.
- Temperature Sensors (e.g., thermocouples) gauge heat intensity.
- Proximity Sensors (e.g., inductive, capacitive) detect presence without touch.
- Vision Sensors (e.g., cameras, LiDAR) analyze visual data.
8.1.2 Based on Contact Type:
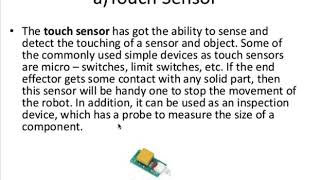
- Contact Sensors require physical touch (e.g., bump sensors).
- Non-contact Sensors utilize electromagnetic fields or light (e.g., ultrasonic, IR).
8.1.3 Based on Output Signal:
- Analog Sensors provide continuous signals (e.g., thermistors).
- Digital Sensors produce discrete outputs (e.g., binary signals, digital encoders).
Concluding this section, the classification of sensors is vital to their application and integration in robotic systems, enabling precise and effective operation.
Youtube Videos






![How to get started with Robotics? [MUST KNOW TIPS] Building Robots for Beginners](https://img.youtube.com/vi/NRj6gzah7JA/mqdefault.jpg)
Audio Book
Dive deep into the subject with an immersive audiobook experience.
Overview of Sensors
Chapter 1 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Sensors are used to detect physical parameters and convert them into measurable signals.
Detailed Explanation
Sensors play a vital role in robotic systems by detecting various physical parameters, such as temperature, pressure, light, or movement. Once they detect these parameters, sensors convert them into signals that can be understood by the robot's processing systems, allowing it to react and interact with its environment effectively.
Examples & Analogies
Think of a sensor like a human sense organ. Just as our eyes detect light and send signals to our brain, allowing us to see, sensors detect changes in the environment and send signals to the robot's 'brain' (the controller) to make decisions.
Classification Based on Measured Quantity
Chapter 2 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
8.1.1 Based on Measured Quantity:
- Position Sensors: Potentiometers, rotary encoders, linear variable differential transformers (LVDTs)
- Velocity Sensors: Tachometers, optical encoders
- Acceleration Sensors: Accelerometers (MEMS, piezoelectric)
- Force/Torque Sensors: Strain gauge-based sensors
- Temperature Sensors: Thermocouples, RTDs
- Proximity Sensors: Inductive, capacitive, ultrasonic, infrared
- Vision Sensors: Cameras, LiDAR, structured light sensors
Detailed Explanation
Sensors can be classified based on the type of physical quantity they measure. For example:
- Position Sensors detect the position of an object in space.
- Velocity Sensors measure how fast an object is moving.
- Acceleration Sensors detect changes in speed.
- Force/Torque Sensors measure the force or torque applied to an object.
- Temperature Sensors track temperature changes.
- Proximity Sensors can sense the presence of objects nearby without direct contact.
- Vision Sensors use cameras and lasers to provide visual data.
Examples & Analogies
Imagine a car equipped with different sensors. The speedometer is a velocity sensor, letting drivers know how fast they are going. The rearview mirror-mounted camera acts as a vision sensor, allowing drivers to see behind them. Each sensor contributes essential information to help the driver (or automated system) make informed decisions.
Classification Based on Contact Type
Chapter 3 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
8.1.2 Based on Contact Type:
- Contact Sensors: Require physical contact (e.g., bump sensors)
- Non-contact Sensors: Use electromagnetic fields or light (e.g., ultrasonic, IR)
Detailed Explanation
Sensors can also be categorized by whether they require physical contact.
- Contact Sensors must touch the object they are measuring. For instance, a bump sensor activates when it physically encounters an object.
- Non-contact Sensors measure distances or detect objects without actual contact, using methods like sound waves (ultrasonic) or infrared light. This is beneficial for ensuring the robot does not collide with obstacles.
Examples & Analogies
Think of a contact sensor like a doorknob that you physically touch to open a door, while a non-contact sensor is like a motion-sensitive automatic door that opens as you approach, without you having to touch it.
Classification Based on Output Signal
Chapter 4 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
8.1.3 Based on Output Signal:
- Analog Sensors: Continuous output (e.g., thermistors)
- Digital Sensors: Discrete output (e.g., binary on/off, digital encoders)
Detailed Explanation
Sensors can also be categorized based on the type of output signal they provide.
- Analog Sensors give a continuous range of values. For example, a thermistor measures temperature and produces an analog signal that varies smoothly with temperature changes.
- Digital Sensors provide discrete signals, like a switch that is either on or off, making them simpler to interpret and process.
Examples & Analogies
Consider an analog sensor like a dimmer switch for a light, where you can smoothly adjust the light level. In contrast, a digital sensor is like a light switch with just two positions: on and off, representing binary states.
Key Concepts
-
Position Sensors: Measure object's location.
-
Velocity Sensors: Assess speed levels.
-
Analog Sensors: Offer continuous signal outputs.
-
Digital Sensors: Result in discrete outputs.
-
Contact Sensors: Require touch to operate.
-
Non-Contact Sensors: Function at a distance without touch.
Examples & Applications
Position sensors like rotary encoders help determine the angle of a robot's joint.
Temperature sensors like thermocouples measure the heat produced in machinery.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
To measure speed or force, you need a special choice. Position sensors guide, let the robot rejoice.
Stories
Imagine a robot named Robo who has a nose that can smell (temperature sensor), ears that can hear (velocity sensor), and eyes that can see (vision sensor). Robo uses these senses to act wisely in a construction site.
Memory Tools
Remember PVCATVP for Position, Velocity, Acceleration, Torque, and Vision sensors.
Acronyms
For output types
'AD' for Analog and Digital sensors.
Flash Cards
Glossary
- Position Sensors
Devices that detect the position of an object in space.
- Velocity Sensors
Tools that measure the speed of an object.
- Acceleration Sensors
Sensors that measure the rate of change of velocity.
- Force/Torque Sensors
Instruments that determine the force or torque applied to an object.
- Temperature Sensors
Devices used to measure temperature.
- Proximity Sensors
Sensors that detect the presence of objects without physical contact.
- Vision Sensors
Devices that process visual data, such as cameras and LiDAR.
- Contact Sensors
Sensors that require physical contact to function.
- NonContact Sensors
Sensors that operate without physical contact, using fields or light.
- Analog Sensors
Sensors that provide continuous output signals.
- Digital Sensors
Sensors that produce discrete output signals.
Reference links
Supplementary resources to enhance your learning experience.