
Plume Dynamics
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to Dispersion Models
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we're discussing dispersion models used in environmental engineering. These models help us predict how pollutants spread in the atmosphere from various sources. Can anyone tell me what they think a dispersion model is?

A way to see how pollution travels in the air?
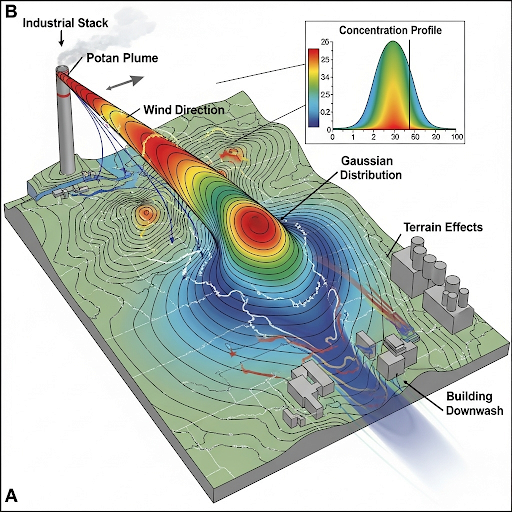
Exactly! It predicts the concentration and distribution of a pollutant based on its source, like a chimneys' emissions. We typically start with the Gaussian dispersion model. The term 'Gaussian' refers to the bell-shaped distribution of pollutants in the air.

So, does that mean pollutants spread evenly from the source?
Not quite. The model simplifies that aspect but in reality, pollutants can be affected by wind and other factors. Remember this: 'Gaussian' is about predicting trends, but we must adjust for actual conditions. Can anyone think of factors that might necessitate these adjustments?

The type of source, like whether it's point or area?
Right! Also, geographic factors. We'll dive into that next.
**Summary**: Today, we learned that dispersion models predict pollutant spread based on the source and environmental conditions, notably starting with the Gaussian model.
Point vs. Area Sources
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Let's expand on dispersion sources. What’s the difference between a point source and an area source?

A point source is like a single chimney, while area sources are larger, like a factory?
Exactly! If we model an area source, we consider uniform emissions across a broader region. It's crucial to adjust our models based on how zoomed in or out we are. Can you visualize how this would affect our calculations?
If we're too zoomed out, we might treat a big area as just a dot?
Exactly! This oversimplifies the reality. Thus, proper modeling ensures accurate predictions. Keep in mind, how would you use data differently if modeling for a city versus a small neighborhood?
We’d need more data points for a city due to many sources?
Yes! And remember to consider local meteorological data for such analyses. That’s an essential factor in dispersion modeling.
**Summary**: We learned that point and area sources require different modeling approaches, particularly regarding the scale of emissions and the necessity for localized data.
Multiple Sources and Non-Additive Contributions
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Today, let’s talk about the effects when we have multiple pollutant sources. Can anyone guess how their contributions would work?
I assume they just add up like regular math?
Great question! It’s actually more complex. Experimental evidence shows that sometimes the contributions are less than simply additive. We describe this relationship with a factor, often less than one. Let’s think: why might that occur?
Maybe the air mixes differently or there’s turbulence?
Spot on! Turbulence and dispersion dynamics can significantly affect outcomes. So, don’t simply assume additions of pollutants will equal expected concentrations. Real-world complexities must be factored in.
**Summary**: We discussed how multiple sources could interact non-linearly in their contributions to pollution dispersion, highlighting the need to consider dynamics like turbulence.
Regulatory Models
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Let’s shift now to Regulatory Models. Have any of you heard about AERMOD or CALPUFF?
I think AERMOD is a common one?
Correct! AERMOD is the regulatory model primarily for steady-state emissions. In contrast, CALPUFF uses a puff model, accounting for non-steady emissions. What do you think are key elements we need to input into these models?
Data like wind speed and temperature?
Exactly! We also require source data—emission rates, stack heights, and even meteorological conditions. Remember that if you lack some of that data, you might prefer using ISC instead.
How do we know these models are accurate?
Great point! Models are validated against real-world data through field experiments where pollutants are released and monitored. This helps ensure reliability.
**Summary**: In reviewing regulatory models like AERMOD and CALPUFF, we noted the importance of specific input data and the critical role of validating these models with real-world experiments.
Experimental Validation
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Finally, let's discuss how we prove that our dispersion models work. How do we validate a model?
By comparing predicted pollutant concentrations with actual measurements?
Precisely! Field experiments often involve releasing tracers to see how they disperse under real conditions. What’s a challenge we might face during these validations?
Getting accurate measurements in varied conditions?
Exactly! Conditions like wind patterns and temperature fluctuations affect dispersion, making it tricky to capture precise data. It's crucial to also consider how different terrains might influence plume behavior as well.
**Summary**: We discussed the critical role of validation in dispersion modeling using field experiments and how various environmental factors must be accounted for in this process.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
This section discusses the principles of plume dynamics concerning dispersion models used to predict air pollution spread from various sources. It emphasizes the importance of adjusting models based on the source type and geographic factors, as well as the need for accurate meteorological data for effective environmental monitoring.
Detailed
Detailed Summary
This section on Plume Dynamics provides an extensive exploration of the complexities involved in modeling the dispersion of pollutants released into the atmosphere. It begins with a review of dispersion models, particularly focusing on how the contributions from different sources are combined to predict concentrations at specific points in the environment. The distinction between point and area sources is illustrated with examples, showcasing the need to adapt model parameters based on the scale of observation.
Key topics covered include:
- Dispersion Models: Understanding the Gaussian dispersion model and its use as a first-step screening tool for estimating pollutant dispersion.
- Point vs. Area Sources: How the treatment of emission sources varies with the scale of the area and the implications for modeling.
- Multiple Sources and Non-Additive Contributions: Discussing the findings that the contributions from multiple stacks do not necessarily add up linearly, highlighting the experimental insights that inform these models.
- Wind Effects: Addressing the effects of terrain, obstacles like buildings, and how they influence plume behavior and dispersion.
- Regulatory Models: Introducing specific models like AERMOD and CALPUFF, their differences, applications, and the data required for their use.
- Experimental Validation: The importance of validating dispersion models using field experiments and wind tunnel studies to ensure they accurately predict real-world outcomes.
Conclusively, the section emphasizes that while dispersion models provide essential tools for environmental monitoring, users must recognize their inherent assumptions and limitations.
Youtube Videos

Audio Book
Dive deep into the subject with an immersive audiobook experience.
Introduction to Plumes in Dispersion Models
Chapter 1 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
When discussing dispersion models, we often visualize the emission from a source as a plume. The plume's behavior and dynamics are influenced by several factors, including wind speed, turbulence, and the geographical features around the source.
Detailed Explanation
In dispersion models, a plume refers to the visible cloud of pollutants emitted from a source into the atmosphere. Understanding how these plumes spread is crucial for predicting their impact on air quality. The dynamics of a plume are not isolated; they interact with environmental conditions such as wind speed and obstacles. For instance, if a plume is emitted from a factory, the surrounding landscape can affect how far and in which direction the pollutants travel.
Examples & Analogies
Think of a plume like smoke from a campfire. On a calm day, the smoke rises directly up. However, if a gust of wind blows, the smoke changes direction and disperses quickly. Similarly, how a pollutant plume behaves in the atmosphere changes based on environmental conditions.
Understanding Plume Contribution from Multiple Sources
Chapter 2 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
When calculating concentrations of pollutants at a specific point, contributions from different sources must be superimposed. Adjustments to coordinates are necessary to accurately account for each source's contribution.
Detailed Explanation
When evaluating pollution levels at a site, it's essential to consider multiple emission sources. Each source contributes to the total pollution concentration but may do so in different ways depending on their distance and orientation. For example, if both a factory and a waste site release pollutants, we must consider their respective distances from the measurement point. The model assumes an additive effect; however, in reality, complex interactions can occur, which may alter the total concentration experienced at any given point.
Examples & Analogies
Imagine you're in a room with two air fresheners. If both are turned on, their scents mix with varying intensities depending on how close you are to each. If you’re near one air freshener, you can smell it more strongly than the other. Similarly, pollutants from different sources will have varying impacts based on their proximity and other environmental factors.
Challenges in Dispersion Modeling
Chapter 3 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Real-world environmental modeling must often deal with turbulent flows and complex interactions, making it difficult to predict dispersion accurately.
Detailed Explanation
Dispersion models make certain assumptions, such as uniform flow and independence between plumes. However, turbulence in natural settings complicates these predictions. For example, when air pollution travels from a factory, it encounters various obstacles like buildings or hills, causing turbulence. This chaotic flow impacts how pollutants spread, often leading to more complex patterns than the simple models can predict.
Examples & Analogies
Think of trying to predict the path of leaves in the wind. In one scenario, if the wind blows steadily across an open field, the leaves generally follow a straightforward path. But if that same wind blows around buildings and through trees, the leaves swirl chaotically, making it harder to guess where they will end up. Similarly, pollutants from a factory can behave unpredictably due to turbulence.
Types of Dispersion Models: AERMOD and CALPUFF
Chapter 4 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
The current regulatory framework uses different models for dispersion analysis, primarily AERMOD for steady-state conditions and CALPUFF for puff modeling.
Detailed Explanation
AERMOD is primarily used for assessing environments with consistent emissions, applying steady-state assumptions. In contrast, CALPUFF can simulate emissions released in bursts or puffs, allowing it to model complex scenarios like accidental releases or explosions. These models require specific data inputs such as emission rates, source characteristics, and meteorological information to provide accurate dispersion predictions.
Examples & Analogies
Consider AERMOD like a car driving on a smooth, straight road at a steady speed, following predictable traffic patterns. CALPUFF, on the other hand, is like a car that starts and stops at various points, responding to unpredictable traffic lights and obstacles. Each model suits different driving (or dispersion) scenarios based on how constant or variable emissions are.
The Importance of Accuracy in Modeling
Chapter 5 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
To ensure reliability in dispersion modeling, verifying predictions through experiments and real-world data collection is vital.
Detailed Explanation
Models must be validated through real-world experiments to ensure their accuracy. This involves comparing predicted pollutant concentrations at various locations with actual measurements. Adjustments can then be made to improve model reliability. Such testing is essential, especially for models used in risk assessments, where inaccurate predictions could lead to significant public health and safety issues.
Examples & Analogies
Imagine a teacher using an equation to predict students' test scores. After the test, if the predictions are consistently off, the teacher would need to reevaluate the formula. Similarly, if a dispersion model consistently mispredicts pollution levels, environmental scientists must refine their models using real data to improve their accuracy.
Key Concepts
-
Dispersion Models: Tools that predict the spread of pollutants based on their sources.
-
Gaussian Distribution: A bell-shaped curve used in modeling how pollutants disperse in the air.
-
Point vs. Area Source: Differentiating between single pollution sources compared to larger, spread-out sources.
-
Regulatory Models: Various models, such as AERMOD and CALPUFF, used for compliance in air quality management.
-
Validation: The need for empirical validation of models to ensure accuracy and reliability.
Examples & Applications
A factory emits pollutants from its stacks. As we model this, we treat the factory as an area source due to its size and influence over a defined region.
In studying air quality, a city might utilize the AERMOD model to understand how emissions from various point sources affect local pollution levels.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
Pollution in the air, so unfair, use a model to see it’s there.
Stories
Imagine a factory belching smoke high into the sky – the Gaussian model helps us understand how wide and far that smoke might blow, affecting health and nature.
Memory Tools
Remember GPS: Gaussian, Point source, Source adjustment for modeling specifics.
Acronyms
AERMOD
Accurate Environmental Release Model for Operational Dispersion.
Flash Cards
Glossary
- Dispersion model
A mathematical framework used to predict the distribution and concentration of pollutants in the atmosphere.
- Gaussian model
A specific type of dispersion model that assumes pollutant concentration follows a bell curve distribution.
- Point source
A single, identifiable source of pollution, such as a chimney.
- Area source
A larger, non-point pollution source, such as a factory or landfill.
- AERMOD
A steady-state dispersion model recommended by the U.S. Environmental Protection Agency.
- CALPUFF
A non-steady state puff model used for modeling the dispersion of pollutants released from sources.
- Turbulence
Irregular or chaotic flow conditions that influence pollutant dispersion.
- Validation
The process of confirming that a model accurately predicts real-world outcomes.
Reference links
Supplementary resources to enhance your learning experience.
- Understanding AERMOD: A Guide to Air Quality Modeling
- Introduction to Dispersion Modeling
- How to Use CALPUFF for Air Quality Assessment
- What is Turbulent Flow and How Does it Affect Dispersion?
- Gaussian Plume Model
- AERMOD 2.3 User's Guide
- Assessing Air Quality Using Dispersion Models
- Field Experiments for Model Validation