
Region of Convergence (ROC)
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to ROC
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we're going to delve into the Region of Convergence, or ROC, associated with the Z-Transform. Can anyone tell me what a 'region of convergence' actually means?

Is it where the Z-Transform actually gives a valid result?
Exactly! The ROC indicates the range of values of 'z' for which the Z-Transform converges. Why do you think this is important?

I guess it helps us understand the behavior of the system?
Yes, it also relates to system stability and causality. If the ROC includes the unit circle, the system is stable. Remember that: 'ROC and Stability go hand in hand.'

This sounds a bit complicated. How do we know what the ROC looks like?
Great question! The shape of the ROC depends on whether the signal is right-sided, left-sided, or two-sided.
Causal vs. Anti-Causal Signals
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Now let’s look deeper into right-sided and left-sided signals. Who can explain what a causal signal is?

A causal signal is one where it only exists for n ≥ 0.
Correct! In this case, the ROC is usually a circle centered at the origin. Can anyone tell me what happens with anti-causal signals?
They exist for n ≤ 0, and their ROC extends outwards from the origin.
Exactly right! Remember that for anti-causal signals, the ROC must extend outwards based on the decay rate.
How about two-sided signals?
Excellent! Two-sided signals typically have an ROC that lies between two circles in the complex plane. Remember to visualize these shapes to better understand them!
Stability and ROC
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Now that we know about the shapes and types of ROCs, let's discuss their connection to system stability. Who recalls what stability means in this context?
A system is stable if it behaves predictably, right?
Correct! More technically, if the ROC includes the unit circle (|z|=1), the system is stable. Can anyone explain what happens if the ROC doesn't include it?
Then the system is unstable!
Exactly! This concept is critical in engineering, especially for control systems. Remember this: 'No ROC, No Stability!'
Examples of ROC
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Let’s explore some examples! If we have a causal signal like x[n] = a^n u[n], can anyone describe its ROC?
The ROC would be outside of the circle with a radius of 'a'?
That’s spot on! Now, what about an anti-causal signal like x[n] = a^n u[-n-1]?
The ROC would be inside the circle with radius 'a'?
Perfect! And if we have a two-sided signal, let’s keep it interesting. What if our x[n] is defined for all n with poles at different points?
The ROC would be the region between those poles!
Exactly! Connecting the dots here really illustrates how vital the ROC is to understanding both the signal and system!
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
The Region of Convergence (ROC) is vital in the Z-Transform, as it identifies the range of values for which the transform is valid. The nature of the signal (causal, anti-causal, or two-sided) determines the shape of the ROC, which in turn indicates system stability and behavior.
Detailed
Detailed Summary
The Region of Convergence (ROC) is an essential concept in the context of the Z-Transform, as it specifies the values of the complex variable 'z' for which the Z-Transform converges. The ROC is critically influenced by the nature of the discrete-time signal, x[n], which can be causal (right-sided), anti-causal (left-sided), or two-sided (defined for all n).
- Right-Sided Signals: For causal signals defined for n ≥ 0, the ROC is typically represented by a circle in the complex plane centered at the origin, and its radius relates to the growth rate of the signal.
- Left-Sided Signals: For anti-causal signals defined for n ≤ 0, the ROC extends from the origin outward, determined by the decay rate of the signal.
- Two-Sided Signals: For signals defined for all n, the ROC usually lies between two concentric circles in the complex plane.
Crucially, the ROC provides insight into the stability of the system:
- If the ROC includes the unit circle (|z|=1), the system is stable.
- If the ROC does not include the unit circle, the system is unstable. This connection between the nature of the ROC and system stability is vital in engineering applications, guiding the design and analysis of discrete-time systems.
Youtube Videos


Audio Book
Dive deep into the subject with an immersive audiobook experience.
Introduction to ROC
Chapter 1 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
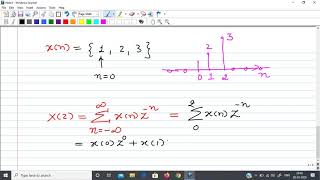
The Region of Convergence (ROC) is a crucial concept when working with the Z-Transform. It specifies the values of z for which the Z-Transform converges. The ROC depends on the nature of the signal x[n] and provides insight into the stability and causality of the system.
Detailed Explanation
The Region of Convergence (ROC) is where the Z-Transform of a discrete-time signal converges, meaning it produces a valid output. Depending on the characteristics of the signal, the ROC can provide vital information, particularly regarding system stability and whether a system is causal or anti-causal. A causal system, for instance, is one where the output only depends on present and past inputs.
Examples & Analogies
Think of the ROC as the range of values where a recipe works fine. Just like some recipes only succeed with specific measurements of ingredients, the Z-Transform only behaves predictably within its ROC.
ROC for Right-Sided Signals
Chapter 2 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
For Right-Sided Signals: If the signal x[n] is causal (i.e., defined for n≥0), the ROC is typically a circle in the complex plane centered at the origin, with a radius determined by the growth rate of x[n].
Detailed Explanation
When dealing with right-sided signals, the signal is considered causal, which means it only has non-zero values for zero and positive time indices (n ≥ 0). In this case, the ROC takes the shape of a circle in the complex plane, centered at the origin. The size of this circle (also known as its radius) is influenced by how quickly the signal increases as n grows. Signals that grow rapidly create larger circles.
Examples & Analogies
Imagine a water fountain that sprays water in a circular motion. The water represents the signal, and the radius of the fountain's water spray corresponds to the ROC. If the fountain sprays wider (like a more rapidly growing function), it signifies a larger ROC.
ROC for Left-Sided Signals
Chapter 3 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
For Left-Sided Signals: If x[n] is anti-causal (i.e., defined for n≤0), the ROC extends from the origin outward, again determined by the decay rate of x[n].
Detailed Explanation
Left-sided signals, which are anti-causal, only have non-zero values for negative time indices (n ≤ 0). For these signals, the ROC begins at the origin and expands outward, resembling an annulus or doughnut shape. The extent to which this region extends is governed by how quickly the signal decays as time moves backward.
Examples & Analogies
Picture a candle burning downwards. As the candle burns, it diminishes, akin to how a left-sided signal decays. The bottom of the candle represents the origin and the remaining candle signifies the ROC, which expands with the decaying candle's height.
ROC for Two-Sided Signals
Chapter 4 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
For Two-Sided Signals: If x[n] is defined for all n, the ROC typically lies between two concentric circles in the complex plane.
Detailed Explanation
Two-sided signals have values at both positive and negative time indices. For these cases, the ROC is outlined between two concentric circles in the complex plane. This illustrates regions where the Z-Transform will converge, not converging on the extremes of growth but within a finite area defined by how the signal behaves as n approaches positive or negative infinity.
Examples & Analogies
Imagine two rings stacked on top of each other. The space between these rings represents the ROC for two-sided signals, just like the area between the two rings defines the bounds where certain activities—like the flow of water or a path—can occur.
Importance of ROC for Stability
Chapter 5 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
The ROC is important for determining the stability and behavior of the system:
● If the ROC includes the unit circle (|z|=1), the system is stable.
● If the ROC does not include the unit circle, the system is unstable.
Detailed Explanation
The ROC is a fundamental aspect of understanding system stability. A system is considered stable if the unit circle (where |z|=1) is included in the ROC. Conversely, if this unit circle is not included in the ROC, it indicates that the system is unstable and may behave erratically or grow without bounds. Essentially, stability in control systems means bounded outputs regardless of bounded inputs.
Examples & Analogies
Think of a teeter-totter (seesaw) at a playground. If the teeter-totter balances around its pivot point (akin to the unit circle being within the ROC), it’s stable. If one end goes too high, it becomes unstable, similar to how a system without the unit circle in its ROC behaves unpredictably.
Key Concepts
-
ROC: The values of z where the Z-Transform converges.
-
Causal Signal: Defined for n ≥ 0, the ROC is usually inside a circle.
-
Anti-Causal Signal: Defined for n ≤ 0, the ROC usually extends outward.
-
Two-Sided Signal: The ROC lies between two concentric circles.
-
Stability: A system is stable if the ROC includes the unit circle.
Examples & Applications
Causal signal example x[n] = a^n u[n] has an ROC outside |z|=a.
Anti-causal signal example x[n] = a^n u[-n-1] has an ROC inside |z|=a.
Two-sided signal example x[n] = (0.5)^n u[n] + (2)^n u[-n-1] has an ROC between |z|=0.5 and |z|=2.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
ROC—convergence's song, in stability it belongs!
Stories
Imagine a river flowing smoothly; this is the ROC where signals converge, leading to stability.
Memory Tools
CATS: Causal means A circle, Two-sided in Between, Stability leads to ROC presence.
Acronyms
ROC
'Region Over Converging signals'.
Flash Cards
Glossary
- Region of Convergence (ROC)
The set of values of the complex variable z for which the Z-Transform converges.
- Causal Signal
A discrete-time signal defined for n ≥ 0.
- AntiCausal Signal
A discrete-time signal defined for n ≤ 0.
- TwoSided Signal
A discrete-time signal defined for all n.
- Stability
A property of a system where a bounded input leads to a bounded output.
Reference links
Supplementary resources to enhance your learning experience.