
Operating System Types for Real-Time and Embedded Applications
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to Real-Time and Embedded Operating Systems
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Let's dive into why we need specialized operating systems for real-time and embedded systems. Can anyone share what might happen if a real-time system fails to meet its timing constraints?

I think it could lead to system failures, especially in critical tasks like medical devices.
Exactly! In fields like healthcare, if information isn't processed in time, it can have dire consequences. Now, when choosing an OS, we have options like RTOS, batch, and time-sharing. What’s the difference?

I guess RTOS needs to ensure tasks are completed on time while batch OS can just run jobs without needing real-time processing.
Great summary! Remember, RTOS is about deterministic execution while batch OS focuses on sequential job execution.
Let’s summarize: A real-time system must meet deadlines or face critical failures, while a batch system can operate without strict timing.
Classification of Operating Systems
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Moving forward, let's classify the types of operating systems. Who remembers the primary use cases for RTOS?

RTOS is mainly for critical tasks that require deterministic execution.
Correct! Now, what about Batch Operating Systems? What do you think their role is?

They are for processing background jobs without user interaction. Like data logging?
Exactly! So, batch OS is often utilized for collecting data where real-time interaction isn’t necessary.
In comparison, who can explain Time-Sharing OS?
They allow multiple tasks to run by giving each task a small time slice.
Exactly, and this makes them suitable for environments like educational boards. Let's recap that RTOS is critical, Batch handles non-interactive tasks, and Time-Sharing shares resources among users.
Real-Time Operating Systems Characteristics
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Now let’s look at the unique characteristics of Real-Time Operating Systems. What are some critical features of RTOS?
Deterministic scheduling and low latency?
Correct! Low latency ensures tasks are completed quickly. What else?
Preemptive multitasking?
Yes! RTOS often utilizes priority-based scheduling. Can anyone give examples of popular RTOS?
FreeRTOS and VxWorks!
Great! Both are widely used in various industries. In summary, RTOS are characterized by deterministic scheduling, low latency, and high reliability.
Embedded Operating Systems Characteristics
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Next, let's discuss Embedded Operating Systems. Can anyone describe their key features?
They have a small footprint and are designed for specific tasks, right?
Exactly! They are optimized for limited resources and often have fast boot times as well. Can anyone mention applications of embedded systems?
Wearables and smart appliances!
Yes! Embedded OS fit into devices like wearables and industrial controllers. Summarizing, embedded systems focus on efficiency in specific tasks with minimal overhead.
OS Selection Criteria for RT/Embedded Systems
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
To conclude, let’s talk about how to choose an appropriate OS for real-time and embedded environments. What are some criteria we should consider?
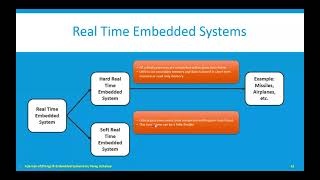
Real-time needs like hard and soft deadlines?
Correct, very important! Also, we need to consider memory footprint and I/O support. Why is that important?
Because devices can have limited resources and need efficient communication methods?
Exactly! And certifications can matter too, especially for safety-critical applications. Let’s wrap up: When selecting an OS, consider real-time requirements, memory use, I/O support, and certifications.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
Operating systems for real-time and embedded applications are classified into several categories, including Real-Time Operating Systems (RTOS), Batch, Time-Sharing, Distributed, and Embedded Systems. Each type is tailored to specific application needs, balancing performance, resource constraints, and timing requirements.
Detailed
Operating System Types for Real-Time and Embedded Applications
Introduction
Real-time and embedded systems operate under specific timing constraints and resource limitations, necessitating specialized operating systems. The choice of OS type—real-time, batch, time-sharing, or distributed—is driven by application requirements, latency tolerances, and system complexities.
Classification of Operating Systems
Different OS types are suited for varied applications:
- Real-Time OS (RTOS): Ensures deterministic execution, ideal for critical tasks.
- Batch OS: Executes jobs sequentially without real-time constraints, suitable for non-interactive tasks.
- Time-Sharing OS: Enables multitasking, fairly allocating CPU time among multiple jobs.
- Distributed OS: Facilitates coordinated operations across multiple networked nodes.
- Embedded OS: Tailored for lightweight, low-power devices.
Real-Time Operating Systems (RTOS)
Key characteristics include deterministic task scheduling, low latency, preemptive multitasking, and support for memory protection and I/O management. Examples include FreeRTOS and VxWorks, each designed for different operational environments.
Batch Operating Systems
Primarily used for non-interactive tasks like data logging, these systems run queued tasks without user input and are less common in today’s embedded systems.
Time-Sharing Operating Systems
These OS divide CPU time among multiple users or tasks, with notable limitations in hard real-time applications. However, they are commonly used in environments like Embedded Linux.
Distributed Operating Systems
These systems share resources across multiple nodes, providing transparency and fault tolerance. Examples include RIOT OS and ROS 2 for networking tasks in IoT and robotics.
Embedded Operating Systems
Built for compact applications, embedded OS have a small footprint, fast boot time, and minimal features. Examples include TI-RTOS and mbed OS, supporting various devices from wearables to industrial controls.
OS Selection Criteria for RT/Embedded Systems
Key selection criteria comprise real-time needs, memory footprint, I/O support, modularity, and ecosystem compatibility, particularly for safety-critical applications.
Comparative Overview
The summary concludes the distinctions among OS types regarding real-time capability, multitasking, scalability, and common uses, essential for industry applications.
Summary of Key Concepts
- Specialized OS types enhance performance in real-time and embedded systems.
- RTOS is crucial for deterministic requirements; distributed OS excel in networked applications.
Youtube Videos


Audio Book
Dive deep into the subject with an immersive audiobook experience.
Introduction to Real-Time and Embedded Systems
Chapter 1 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Real-time and embedded systems require operating systems tailored to their timing constraints, resource limitations, and application environments.
● The selection of OS type—real-time, batch, time-sharing, or distributed—depends on application needs, latency tolerance, and system complexity.
Detailed Explanation
This chunk introduces the concept of real-time and embedded systems, which are specialized computing systems used in situations where timing is critical and resources are limited. The choice of an operating system (OS) is crucial and is influenced by specific needs such as how quickly tasks must be completed (latency), the resources available (like memory), and how complex the system is. Different types of operating systems exist to meet these various needs.
Examples & Analogies
Consider a traffic light system. It needs to operate on precise timing to ensure safety at intersections, making it a real-time system. If the light changes too late or too early, it could cause accidents. The selection of software that controls this system must be real-time capable, just as selecting the right shoe is important for running efficiently.
Classification of Operating Systems
Chapter 2 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
| OS Type | Primary Use Case |
|---|---|
| Real-Time OS (RTOS) | Deterministic execution for critical tasks |
| Batch OS | Sequential job execution, no real-time constraints |
| Time-Sharing OS | Multitasking with fair CPU time for all tasks |
| Distributed OS | Coordinated operations across multiple networked nodes |
| Embedded OS | Lightweight, low-power systems for specific devices |
Detailed Explanation
This chunk presents a classification of different types of operating systems and their primary use cases. It categorizes them into five types: Real-Time Operating Systems (RTOS) which ensure tasks are completed with precise timing; Batch Operating Systems which manage jobs sequentially without delay; Time-Sharing Systems that allow multiple tasks to share CPU resources; Distributed Operating Systems which run across multiple interconnected systems; and Embedded Operating Systems designed for specific devices with limited resources.
Examples & Analogies
Imagine how a chef works in a restaurant. A Real-Time OS is like a head chef ensuring every order is prepared quickly and correctly. A Batch OS is like a chef preparing a large quantity of one dish in the background. A Time-Sharing OS is like a chef taking turns to prepare different dishes at the same time, while a Distributed OS is akin to multiple chefs working in different kitchens coordinating to deliver a menu. Finally, an Embedded OS is like the chef responsible for a vending machine, where the function is limited to dispensing specific snacks.
Key Characteristics of Real-Time Operating Systems (RTOS)
Chapter 3 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Key Characteristics:
● Deterministic task scheduling
● Low latency and high reliability
● Preemptive multitasking with priority-based scheduling
● Optional support for memory protection and I/O management
Detailed Explanation
Here, we focus on the key characteristics of Real-Time Operating Systems (RTOS). RTOS are designed for environments where tasks need to be scheduled predictably (deterministic scheduling) and where quick response times (low latency) are critical. They also support running multiple tasks (preemptive multitasking) based on priority, ensuring that the most crucial tasks are handled promptly. Additional features may include memory protection to safeguard application data and I/O management for efficient interaction with devices.
Examples & Analogies
Think about a fire alarm system, which needs to respond immediately to smoke detection. The deterministic scheduling ensures it knows exactly when to check for smoke. Low latency helps it react as quickly as possible, and preemptive multitasking allows it to oversee multiple sensors simultaneously, making sure the most critical alarms get attention first.
Examples of Real-Time Operating Systems (RTOS)
Chapter 4 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Popular RTOS Examples:
RTOS Features
FreeRTOS | Lightweight, scalable, widely used in MCUs
Zephyr OS | Modular, open source, used in IoT
VxWorks | Commercial-grade, supports safety-critical systems
QNX | POSIX-compliant, high-reliability RTOS for automotive/medical
Detailed Explanation
This chunk lists popular examples of Real-Time Operating Systems (RTOS) and describes their features. FreeRTOS is known for its lightweight and scalable nature, making it popular in microcontroller units (MCUs). Zephyr OS is recognized for its modular design, catering to Internet of Things (IoT) applications. VxWorks is a commercial-grade RTOS that meets stringent safety requirements, while QNX is highly reliable and often used in automotive and medical applications.
Examples & Analogies
Think of different well-known car brands that cater to different needs. FreeRTOS is like a fuel-efficient compact car (good for small tasks), Zephyr OS is more modular like a customizable SUV suited for various terrains, VxWorks is the luxury car that meets strict regulations and offers safety, while QNX resembles a dependable family car designed with high safety features for medical emergencies.
Embedded Operating Systems
Chapter 5 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Feature Description
--- | ---
Small Footprint | Fits into kilobytes of memory
Fast Boot Time | <100 ms startup often required
Minimal Features | Focus on drivers, scheduling, and limited file system
Used In | Wearables, smart appliances, industrial controllers
Detailed Explanation
In this section, we define the characteristics of embedded operating systems. These systems have a small memory footprint, meaning they require very little memory space usually in kilobytes. Additionally, they have a fast boot-up time, often needing to start up in less than 100 milliseconds. Their features are minimal since they primarily focus on the drivers required to control specific hardware and basic scheduling functions, making them suitable for devices like wearables, smart appliances, and industrial controllers.
Examples & Analogies
Think of a smartwatch; it needs an operating system that can fit into a small amount of memory to accommodate its design. It must start quickly so users can access the time and notifications effortlessly. The simplicity of the OS means it focuses on what it needs to do, just like a simple dial on a watch that serves its purpose effectively without unnecessary complexity.
OS Selection Criteria for RT/Embedded Systems
Chapter 6 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
| Criteria | Considerations |
|---|---|
| Real-Time Needs | Hard vs soft deadlines |
| Memory Footprint | RAM/ROM usage |
| I/O Support | Serial, CAN, SPI, USB, Ethernet |
| Certification | Required for safety-critical use (e.g., ISO 26262, DO-178C) |
| Modularity | Kernel customization and extension support |
| Ecosystem | Available drivers, middleware, development tools |
Detailed Explanation
This chunk outlines the criteria for selecting an operating system for real-time or embedded systems. The selection is based on whether hard deadlines must be met (hard vs. soft real-time). The amount of memory required (memory footprint) is also critical. Input/output (I/O) support varies, which is necessary for different types of connections (like USB or serial). In safety-critical applications, proper certifications might be needed, while modularity allows for customization. Finally, an ecosystem filled with development tools and drivers helps with easier application development.
Examples & Analogies
Imagine choosing a vehicle for a specific job. Depending on whether you need it for express deliveries (hard real-time) or local deliveries (soft real-time), you would choose differently. The vehicle must fit your storage needs (memory footprint), support necessary features like a GPS (I/O support), and often require certifications (like safety ratings) just like vehicles need to comply with road safety laws.
Key Concepts
-
RTOS: Real-Time Operating Systems are used to guarantee deterministic execution for critical applications.
-
Batch OS: These systems process jobs sequentially and do not require real-time constraints.
-
Time-Sharing OS: Allows multiple tasks to share CPU time, but is not suitable for hard real-time applications.
-
Distributed OS: Operate across multiple nodes, providing a unified system for resource sharing.
-
Embedded OS: Designed for specific devices, they are lightweight and often require minimal feature sets.
Examples & Applications
FreeRTOS used in IoT applications for fast response times.
Batch operating systems used in sensor data logging.
Time-sharing systems like Embedded Linux for multitasking applications.
Distributed OS such as RIOT OS for managing IoT clusters.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
RTOS may keep you on track, with timing right, no turning back.
Stories
Imagine a train schedule; if it doesn't arrive on time, passengers miss connections. This is similar to what RTOS ensures for timely task completion.
Memory Tools
Remember the acronym 'BERT' for Batch, Embedded, Real-time, and Time-sharing to categorize OS types.
Acronyms
R.T.O.S
Real-time tasks
Overseeing outputs
Systematic schedules.
Flash Cards
Glossary
- RealTime Operating System (RTOS)
An operating system designed to serve real-time application requests with deterministic timing.
- Batch Operating System
An OS that processes jobs sequentially without user interaction.
- TimeSharing Operating System
An OS that allows multiple users or tasks to share system resources simultaneously.
- Distributed Operating System
An OS that manages a collection of independent computers that appear to users as a single coherent system.
- Embedded Operating System
A specialized OS designed to operate on embedded systems often with constrained computational resources.
Reference links
Supplementary resources to enhance your learning experience.