
Degrees of Freedom (DOF)
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Understanding Degrees of Freedom
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we're going to discuss Degrees of Freedom, or DOF. Can anyone tell me what they think DOF means in the context of robots?

I think it’s about how many movements a robot can make?
Exactly! DOF refers to the total number of independent movements a robot can perform. In a typical 3D space, how many DOF do you think a robot needs?

Is it six? Three for moving in space and three for rotating?
That's correct! To summarize, we need six DOF: three translational movements along X, Y, Z and three rotational movements. Remember this as the ‘6-DoF rule’.
Types of Joints
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Now, let’s talk about how joints contribute to DOF. Can anyone name a type of joint in a robot?

I remember we talked about revolute joints before!
Correct! Each revolute joint contributes 1 rotational DOF. What about prismatic joints?

They provide translation, right? So that's also 1 DOF?
Exactly! So when designing a robot, understanding the contributions of these joints helps evaluate the overall mobility of the system.
Importance of DOF Analysis
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Why do you think analyzing DOF is important when designing robots for construction applications?
It helps us know how well the robot can move, right?
Absolutely! Effective DOF analysis is necessary for tasks like robotic arms in bricklaying or welding. It helps in creating more versatile and efficient mechanisms.
So if a robot has more joints, it can do more tasks?
Correct! More joints can mean more DOF, but too many can complicate control. Balance is key. Always remember so you can apply this knowledge in real-world scenarios!
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
In robotic systems, Degrees of Freedom (DOF) represent the independent movements a robot can make. For rigid bodies in 3D space, a total of six DOF is essential to allow free movement in three translational and three rotational dimensions. The contribution of joints to DOF is crucial for assessing robot mobility, particularly in the design of robotic arms for applications in construction.
Detailed
Degrees of Freedom (DOF)
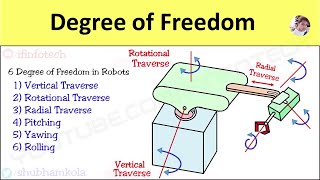
Degrees of Freedom (DOF) is a vital concept in robotics that refers to the total number of independent movements a robot can perform. In the context of rigid bodies in three-dimensional space, a robot typically requires six DOF to facilitate unrestricted movement:
- Translational DOF: Three movements along the X, Y, and Z axes (forward/backward, left/right, and up/down).
- Rotational DOF: Three rotations around the X, Y, and Z axes (pitch, yaw, and roll).
Each joint in a robotic system contributes to its overall DOF:
- Revolute Joint: Provides 1 rotational DOF.
- Prismatic Joint: Provides 1 translational DOF.
Analyzing DOF is crucial for various applications, especially in construction robotics where understanding the robot's mobility helps design more efficient mechanisms for specific tasks, such as robotic arms used for bricklaying or welding.
Youtube Videos






Audio Book
Dive deep into the subject with an immersive audiobook experience.
Definition of Degrees of Freedom
Chapter 1 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Degrees of Freedom (DOF)
- Represents the number of independent movements a robot can perform.
Detailed Explanation
Degrees of Freedom (DOF) tells us how many ways a robot can move independently. Each movement counts as a degree of freedom. For example, if a robot arm can rotate around a joint, that rotation is one degree of freedom. If it can also slide in and out, that's another degree of freedom. Thus, DOF is a critical concept in understanding how flexible and mobile a robot is.
Examples & Analogies
Think of a human arm. It can move in multiple ways: bending at the elbow, rotating at the shoulder, moving back and forth, and so on. Each of these actions represents a degree of freedom. Just like a person can reach for different items with their hand, robots with appropriate DOFs can interact with their environment more effectively.
Degrees of Freedom in 3D Space
Chapter 2 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
- For rigid bodies in 3D space, 6 DOF are typically required (3 for position, 3 for orientation).
Detailed Explanation
In three-dimensional space, a rigid body, like a robot arm, typically needs six degrees of freedom to move freely. The first three degrees are for positioning the object in space: moving left or right, up or down, and forward or backward (these correspond to the X, Y, and Z axes). The other three degrees involve orientation: rotating around the X-axis (pitch), Y-axis (yaw), and Z-axis (roll). This combination allows a robot to navigate and manipulate objects in any direction.
Examples & Analogies
Consider a drone flying in the sky. It needs to move up and down (height), fly forward and backward (depth), and shift left and right (width). Additionally, it must rotate to face different directions as it navigates. Without these six movements, it could not effectively maneuver through its environment.
Joint Contributions to Degrees of Freedom
Chapter 3 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
- Each joint contributes to DOF:
- Revolute Joint: 1 DOF (rotation)
- Prismatic Joint: 1 DOF (translation)
Detailed Explanation
Each type of joint that a robot employs contributes to its degrees of freedom. A revolute joint, which allows parts to rotate around an axis, adds one degree of freedom. In contrast, a prismatic joint, which enables parts to slide or translate along a path, also adds one degree of freedom. The combination of these joints determines how complex or simple a robot’s movement can be.
Examples & Analogies
Imagine a door as a simple example of a revolute joint: it can swing open and closed. Conversely, think of a sliding drawer in a cabinet as a prismatic joint: it can only slide in and out. Both serve specific purposes in movement but do so in different ways.
Importance of DOF Analysis
Chapter 4 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
- DOF analysis is essential for:
- Evaluating mobility
- Designing mechanisms for construction robotics, e.g., robotic arms for bricklaying or welding.
Detailed Explanation
Analyzing the degrees of freedom of a robotic system is crucial for understanding its mobility and capabilities. An efficient DOF analysis helps engineers design robots that are capable of performing specific tasks, such as manipulating construction materials like bricks during building projects. For instance, a robotic arm designed for bricklaying must have sufficient DOF to reach different locations and orientations to place bricks accurately.
Examples & Analogies
Think of a construction worker who uses various tools to perform his job: a hammer for driving nails, a screwdriver for screws, and a wrench for nuts and bolts. Each tool allows the worker to perform specific tasks based on its design and versatility, similar to how a robot’s DOF determines what tasks it can accomplish efficiently.
Key Concepts
-
Degrees of Freedom (DOF): The number of independent movements a robot can perform.
-
Revolute Joint: A joint that allows rotational movement, contributing to DOF.
-
Prismatic Joint: A joint that permits linear movement, also contributing to DOF.
-
Translational Movements: Movements in straight lines along defined axes.
-
Rotational Movements: Movements around a defined axis, essential for 3D motion.
Examples & Applications
A robotic arm designed for welding typically has at least 6 DOF to maneuver around complex structures.
An assembly line robot uses prismatic joints to move along a conveyor belt, optimizing its DOF for tasks.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
To move in three ways and spin all around, six DOF are what we have found.
Stories
Imagine a robot in a 3D world, with arms that can spin and legs that can twirl. It needs 6 DOF to build, grasp and play, enabling it to work for us every single day.
Memory Tools
RPT: Remember Position is Translated and Revolved to memorize the joint types.
Acronyms
DORM
Degrees Of Robot Movements - helps in recalling what DOF stands for.
Flash Cards
Glossary
- Degrees of Freedom (DOF)
The number of independent movements a robot can perform, typically 6 in rigid bodies for 3D motion (3 translations and 3 rotations).
- Revolute Joint
A joint that allows rotation around an axis, contributing 1 DOF.
- Prismatic Joint
A joint that allows linear translation, contributing 1 DOF.
- Translational Movement
Movement along a straight path in a defined direction (X, Y, Z).
- Rotational Movement
Movement around an axis, typically referred to as pitch, roll, and yaw.
Reference links
Supplementary resources to enhance your learning experience.