
Motion Planning Algorithms
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to Motion Planning and C-Space
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, let's start with the concept of configuration space, often referred to as C-Space. C-Space represents all the possible configurations of a robot, combining its position and orientation.

So, is C-Space where we factor in obstacles that the robot might encounter?
Exactly! We can visualize obstacles in C-Space, which helps in planning paths that keep robots from colliding with those obstacles.

What kind of algorithms do we use to process this C-Space for planning?
Good question! We have several algorithms, but first, let me give you a mnemonic to remember them: P.R.A.P. - for Probabilistic Roadmaps, RRT, A*, and Potential Field Method.

Can we explore the Probabilistic Roadmaps algorithm first?
Sure! PRM is a great choice, as it neatly handles multi-query planning. It essentially creates a roadmap of points in free space.

So it generates paths based on previously identified free points?
Exactly right! This way, it can save computational resources for multiple navigation queries.
To summarize, C-Space helps us visualize configurations, and the algorithms like PRM allow us to effectively plan paths through this space.
Deep Dive into Path Planning Algorithms
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Now, let's get into some other path planning algorithms, starting with RRT. Who can explain what RRT does?
RRT stands for Rapidly Exploring Random Tree, right? It tries to create a path by exploring space like a tree.
Correct! And it's particularly useful in high dimensions. RRT explores random configurations and expands the tree towards the goal.
What about the A* algorithm? How is it different from RRT?
A* uses heuristics for finding the shortest path, balancing between exploration and target seeking. It can often find optimal solutions much quicker in specific layouts.
I've heard about the Potential Field Method too. What's special about that?
The Potential Field Method uses attractive and repulsive forces, guiding the robot towards the goal while pushing away from obstacles. It’s reactive and efficient in dynamic environments.
So, could we say each algorithm has its advantages based on different scenarios?
Absolutely! Understanding their strengths is key to selecting the right one for the right situation. Remember, P.R.A.P. will help you recall the algorithms effectively!
To summarize, today we discussed RRT, A*, and the Potential Field Method, each offering unique advantages for motion planning.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
Focusing on the intricacies of robotics, this section delves into motion planning algorithms, highlighting configuration space (C-Space) for mapping obstacles and various path planning algorithms like PRM, RRT, A*, and Potential Field Method, crucial for ensuring collision-free navigation in cluttered environments.
Detailed
Motion Planning Algorithms
In the domain of robotics, effectively planning motion is essential for accomplishing tasks efficiently and safely. This section is dedicated to understanding motion planning algorithms, elaborating on the concept of configuration space (C-Space), which represents all possible states of a robot. Importantly, it discusses the role of various path planning algorithms used to navigate complex environments without collisions.
Key Concepts:
- Configuration Space (C-Space): This is a mathematical representation that encompasses all potential states of a robot. Obstacles within this space are mapped to ensure the robot can navigate without collision.
- Path Planning Algorithms: - Probabilistic Roadmaps (PRM): A method used for multi-query planning in high-dimensional spaces, efficient for environments where the robot needs to move around obstacles. - Rapidly Exploring Random Trees (RRT): An algorithm that explores the space in a tree-like structure, quickly finding paths through complex configurations. - A* Algorithm: This algorithm uses heuristics to find the shortest path effectively. - Potential Field Method: Utilizes potential functions to guide the robot away from obstacles while orienting it towards the goal.
These algorithms are particularly significant as they enable robots to navigate cluttered environments seamlessly, ensuring collision-free motion, which is critical in applications involved in construction and civil engineering.
Youtube Videos






Audio Book
Dive deep into the subject with an immersive audiobook experience.
Configuration Space (C-Space)
Chapter 1 of 2
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
9.11.1 Configuration Space (C-Space)
- Represents all possible robot states.
- Obstacles are mapped into C-space for planning.
Detailed Explanation
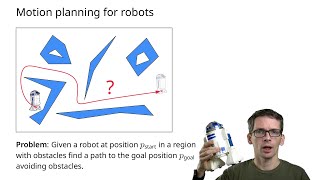
Configuration Space (C-Space) is a theoretical space that includes all possible positions and orientations that a robot can occupy. Each point in this space represents a unique state of the robot. When planning a robot's motion, it's essential to take into account the obstacles in the environment. These obstacles are also represented in C-Space, which helps in identifying valid space the robot can move through safely. Essentially, C-Space helps in visualizing and solving the problem of navigating through a physical space by transforming it into a more manageable mathematical space.
Examples & Analogies
Imagine a city map where every street and building represents a possible location for a vehicle. Each street intersection is a point in this map just like points in C-Space. If you wanted to plot a course for your vehicle to avoid traffic (representing obstacles), you'd analyze the map to find the best route, just as robots use C-Space to determine safe paths.
Path Planning Algorithms
Chapter 2 of 2
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
9.11.2 Path Planning Algorithms
- Probabilistic Roadmaps (PRM)
- Rapidly Exploring Random Trees (RRT)
- A* Algorithm
- Potential Field Method
- Used for:
- Navigating cluttered environments
- Ensuring collision-free motion
Detailed Explanation
Path planning algorithms are essential for enabling robots to navigate from one point to another while avoiding obstacles. Several methods exist, including:
1. Probabilistic Roadmaps (PRM): This method randomly samples points in the configuration space and connects them to form a roadmap, which can be used for planning paths.
2. Rapidly Exploring Random Trees (RRT): This algorithm builds a tree of possible paths by randomly exploring the space and extending from the current endpoint towards a goal.
3. A* Algorithm: A popular algorithm that combines the benefits of Dijkstra's algorithm and heuristics to find the shortest path from start to goal.
4. Potential Field Method: This approach creates an artificial potential field where obstacles repel the robot while the goal attracts it, guiding the robot safely towards its destination.
These algorithms ensure that the robot can effectively navigate through crowded environments without colliding with obstacles.
Examples & Analogies
Think of a robot as a person trying to navigate through a crowded market. Path planning algorithms are like the strategies that person uses to find the best route. For instance, using a smartphone map app (A* Algorithm) to avoid roadblocks (obstacles) or changing directions randomly to find a better path (RRT) can help them reach their destination without bumping into people.
Key Concepts
-
Configuration Space (C-Space): This is a mathematical representation that encompasses all potential states of a robot. Obstacles within this space are mapped to ensure the robot can navigate without collision.
-
Path Planning Algorithms: - Probabilistic Roadmaps (PRM): A method used for multi-query planning in high-dimensional spaces, efficient for environments where the robot needs to move around obstacles. - Rapidly Exploring Random Trees (RRT): An algorithm that explores the space in a tree-like structure, quickly finding paths through complex configurations. - A* Algorithm: This algorithm uses heuristics to find the shortest path effectively. - Potential Field Method: Utilizes potential functions to guide the robot away from obstacles while orienting it towards the goal.
-
These algorithms are particularly significant as they enable robots to navigate cluttered environments seamlessly, ensuring collision-free motion, which is critical in applications involved in construction and civil engineering.
Examples & Applications
Using PRM to plan paths for a robotic arm in a factory setting, where multiple packages are handled repeatedly.
Implementing RRT in a drone navigating through a forest to avoid trees while reaching a specific altitude.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
In C-Space we traverse, to navigate and rehearse, mapping obstacles with care, ensuring pathsare fair.
Stories
Once upon a time, a robot named Reddy wanted to reach a goal. But every time he approached, he found obstacles in his way. Reddy discovered C-Space, where he could see all possibilities and decided to use RRT and PRM to find the best path safely!
Memory Tools
Remember P.R.A.P.: Probabilistic Roadmaps, RRT, A*, and Potential Fields for motion planning algorithms to navigate.
Acronyms
C-Space
Configuration Space for robot placement and path selection.
Flash Cards
Glossary
- Configuration Space (CSpace)
A mathematical representation encompassing all possible configurations of a robot.
- Path Planning Algorithms
Algorithms designed to determine a feasible path for a robot to follow, avoiding obstacles.
- Probabilistic Roadmaps (PRM)
A path planning algorithm that builds a roadmap of collision-free paths based on random sampling.
- Rapidly Exploring Random Trees (RRT)
An algorithm that incrementally builds a tree of paths by exploring space randomly and guiding towards the target.
- A* Algorithm
A pathfinding algorithm that uses heuristics to efficiently find the shortest path between points.
- Potential Field Method
A method utilizing attractive and repulsive forces to guide a robot towards a goal and away from obstacles.
Reference links
Supplementary resources to enhance your learning experience.