
Human-Robot Collaboration (HRC) in Tunnel Construction
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to HRC
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Welcome everyone! Today we're delving into Human-Robot Collaboration, or HRC, in tunnel construction. Why do you think HRC is becoming vital in this industry?

Because tunnels are dangerous places, right? Human workers need help.
Exactly! HRC allows robots to assist humans in hazardous environments, minimizing risk. Can anyone think of examples of tasks where robots might help?

Maybe when we need to transport heavy materials?
Great example! Robots can assist with lifting and transporting heavy tools. Remember, our acronym for the main types of HRC is TSP: Teleoperation, Shared Autonomy, and Physical Collaboration. Let's explore each one!
Types of HRC
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Now, let’s dive deeper into the types of HRC. First up is Teleoperation. Who can explain what this means?

Isn’t that where humans control robots from a distance, especially in unsafe areas?
Correct! By controlling robots remotely, human workers can perform necessary tasks while keeping safe. What about Shared Autonomy?

That’s when the robot does routine tasks, but humans step in for more complex decisions, right?
Yes, and this ensures efficient workflows while keeping human judgment in key situations. Lastly, what is Physical Collaboration?
It’s when robots and humans work side by side, like when robots help lift heavy objects!
Excellent! Remember TSP: Teleoperation, Shared Autonomy, Physical Collaboration! These are crucial in improving efficiency and safety.
Safety Mechanisms
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Let’s focus on safety now. Why do you think safety mechanisms are critical in HRC?
Because robots work alongside humans. We need to prevent accidents!
Absolutely! Safety mechanisms like proximity sensors are crucial. Can anyone explain how they work?
They alert robots when humans get too close, so the robot can stop!
Exactly! Other safety measures include emergency stop functions for quick reactions. Let’s not forget visual and audio alerts! They keep humans aware of their surroundings.
That seems really important for keeping everyone safe on-site!
Absolutely! Always remember, safety is paramount in any collaborative work environment.
Benefits of HRC
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
As we wrap up our session on HRC, let’s consider the benefits. Why do you think integrating robots with humans is advantageous?
They can work in dangerous areas without putting people at risk!
And they can carry out tedious tasks, allowing humans to focus on more complex issues.
Great insights! HRC indeed reduces physical strain and improves overall efficiency. Lastly, what do you think the future holds for HRC in tunnel construction?
Maybe we'll see more advanced AI in robots, so they can handle even more complex tasks!
Exactly! The future looks promising. Remember, HRC is all about enhancing human capabilities with robotic assistance.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
HRC in tunnel construction leverages robotic systems to assist human workers by performing tasks that are hazardous or require precision. Various types of HRC include teleoperation, shared autonomy, and physical collaboration, each enhancing safety through mechanisms like proximity sensors and emergency stops.
Detailed
Human-Robot Collaboration (HRC) in Tunnel Construction
Human-Robot Collaboration (HRC) is crucial in tunnel construction, where safety and efficiency are paramount. As the construction environment often poses risks, HRC allows robotic systems to complement human expertise rather than replace it. This section explores the different types of HRC, including:
- Teleoperation: In scenarios where humans cannot safely enter, operators can control robots from a distance, which is vital for monitoring and performing tasks in hazardous conditions.
- Shared Autonomy: Here, robots conduct routine operations while humans oversee and intervene when necessary. This system increases productivity while maintaining a necessary level of human control.
- Physical Collaboration: Robots assist human workers with heavy tools or materials, which not only enhances efficiency but also decreases the physical strain on human operators.
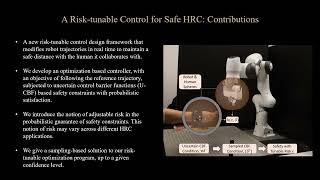
Safety mechanisms are integral to HRC, ensuring that human workers are protected during collaborative tasks. These include proximity sensors that minimize risks of collision, emergency stop functions, visual and audio alerts for situational awareness, and force-limiting actuators that help adapt robotic behaviors to human actions. Understanding and optimizing these collaborative frameworks redefine traditional tunneling practices, creating safer and more efficient construction processes.
Youtube Videos








Audio Book
Dive deep into the subject with an immersive audiobook experience.
Need for HRC
Chapter 1 of 3
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Some tasks still require human judgment or intervention.
Robotic systems assist or augment human capabilities, not replace them entirely.
Detailed Explanation
In tunnel construction, while robotic technology has advanced significantly, there are still scenarios where human input is necessary. For example, complex decision-making tasks require human judgment, especially in unpredictable environments. Robots are designed to enhance what humans can do, but they cannot completely take over every task. Instead, they offer support, making it easier and safer for human workers to carry out their jobs.
Examples & Analogies
Think of a surgeon who uses robotic tools during surgery. While the robot can perform precise movements, the surgeon is still essential for making critical decisions and handling unexpected complications. Similarly, in tunnel construction, robots can perform repetitive or dangerous tasks, but humans are needed for complex decision-making.
Types of HRC
Chapter 2 of 3
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Teleoperation: Human operators remotely control robots in unsafe or inaccessible areas.
Shared Autonomy: Robot handles routine tasks; human intervenes during exceptions.
Physical Collaboration: Co-working robots assist humans in handling heavy tools or segments.
Detailed Explanation
Human-robot collaboration (HRC) can take various forms in tunnel construction. Teleoperation allows humans to control robots from a distance, which is particularly useful in dangerous areas. Shared autonomy enables robots to manage routine tasks autonomously, but a human can take over when something unusual occurs. Finally, in physical collaboration, robots may work alongside humans, providing assistance with heavy lifting or precise tasks, increasing the overall safety and efficiency of the operation.
Examples & Analogies
Imagine a construction site where a human operator uses a joystick to control a robotic arm that is too dangerous for a person to approach. That's teleoperation. For shared autonomy, picture a smart vacuum that can clean a room but alerts the owner when it encounters a corner that requires manual cleaning. Lastly, consider a warehouse where robots help workers by lifting heavy boxes, making it easier for the workers to manage their tasks—this is physical collaboration.
Safety Mechanisms
Chapter 3 of 3
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Proximity sensors and emergency stop functions.
Visual or audio alerts.
Lightweight robotic arms with force-limiting actuators.
Detailed Explanation
Safety is crucial when integrating robotic systems in tunnel construction. Proximity sensors can detect the presence of human workers or obstacles, prompting the robot to stop to prevent accidents. Emergency stop functions can be activated immediately for safety. Additionally, visual and audio alerts help inform human workers about the robot's activities or potential hazards. Lightweight robotic arms equipped with force-limiting actuators ensure that if they do contact a person, the impact is minimal, reducing the risk of injury.
Examples & Analogies
Consider how an automatic door works. It senses when someone approaches and opens, just like a proximity sensor. If it malfunctions, there’s typically a button you can press to stop it from closing suddenly—like the emergency stop function for robots. The lightweight robotic arms are similar to how a gentle child might push against a door to see if it's closed; they won't forcefully slam it open.
Key Concepts
-
Human-Robot Collaboration (HRC): A partnership enhancing safety and efficiency.
-
Teleoperation: Remote control of robotic systems by human operators.
-
Shared Autonomy: Collaborative approach combining robot routine tasks and human intervention.
-
Physical Collaboration: Direct assistance from robots to humans in physical tasks.
-
Safety Mechanisms: Precautions taken to ensure human safety in environments with robots.
Examples & Applications
Teleoperation is useful where humans cannot safely enter, like inspecting collapsed tunnel sections.
Shared Autonomy allows a robot to lay down tracks while a human monitors for unpredictable environmental shifts.
Physical Collaboration can include a robotic arm helping a worker lift heavy pipes during tunnel reinforcement.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
In a tunnel dark and deep, Robots help, and humans leap. Together they work side by side, In safety’s embrace, they do abide.
Stories
Imagine a construction site deep underground where a robot named Robo assists a human named Sam. Robo, with sensors, helps Sam avoid the dangerous areas while carrying heavy loads, ensuring they both return safely after a long day of work.
Memory Tools
Remember TSP: Teleoperation, Shared Autonomy, Physical Collaboration—three ways humans and robots work together efficiently.
Acronyms
HRC - Humans and Robots Collaborate for safety and efficiency in construction.
Flash Cards
Glossary
- HumanRobot Collaboration (HRC)
A partnership in which robots assist or augment human capabilities, especially in tasks that require high precision, safety, or efficiency.
- Teleoperation
A mode of interaction where a human operator remotely controls a robot to perform tasks.
- Shared Autonomy
A collaborative approach where robots perform routine tasks while humans handle exceptions and decisions.
- Physical Collaboration
Direct interaction between robots and humans, where robots assist in handling tasks that require strength or precision.
- Safety Mechanisms
Systems designed to prevent accidents and ensure the safety of human workers in environments where robots operate.
Reference links
Supplementary resources to enhance your learning experience.