
Introduction
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Overview of Ranging Sensor Basics
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today we will start by discussing what a ranging sensor is. Who can tell me how an ultrasonic sensor measures distance?

Isn't it by sending sound waves and measuring how long it takes for the echo to return?
Exactly! We place the formula: Distance = (Time * Speed of Sound) / 2. Can anyone remember why we divide by 2?

Because the sound wave travels to the object and back, so we need to account for both ways!
Great job! Remember this concept because it is crucial for understanding how we will develop our kernel module.
Importance of Kernel Module
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

So why is it important to create a kernel module for our ranging sensor?

To interact directly with hardware, right?
Exactly! Kernel modules allow us to extend the functionality of the Linux kernel without altering the kernel source code. What do you think will be some advantages of this approach?

It makes updates easier and lets us develop applications independently!
Absolutely! This modular approach is very powerful and forms the backbone of many Linux-based applications.
User-Space Interaction
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Now that we understand the kernel module's role, how do you think user-space applications interact with it?
Is it through device files?
Correct! Device files will provide a means to read the distance data. Can anyone think of how that might work?
I think we would use system calls like read and write to communicate with the module.
Yes, excellent! This layer of access is essential for ensuring user applications can fetch real-time sensor data.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
In this introduction, we preview the process of building a kernel module that interfaces with an ultrasonic ranging sensor. It outlines the key functionalities of the sensor and emphasizes the interaction between the kernel module and user-space applications.
Detailed
Detailed Summary
In this section, we establish the groundwork for building a kernel module for an ultrasonic ranging sensor, which is widely utilized in distance measurement applications. The sensor works by emitting sound waves and calculating the distance by measuring the time taken for the echo to return. By creating a kernel module, we enable our system to interact with the sensor hardware directly, collecting distance measurement data and providing access to this data for user-space applications. This section emphasizes the importance of kernel module design and outlines the core functionalities we will cover, including the interaction with the GPIO pins of the ultrasonic sensor and the steps for writing, compiling, and loading the kernel module. The significance of this process lies in demonstrating how kernel modules operate as a bridge between hardware and software in a Linux environment.
Youtube Videos

Audio Book
Dive deep into the subject with an immersive audiobook experience.
Overview of the Chapter
Chapter 1 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
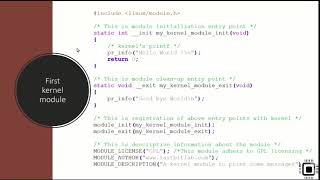
In this chapter, we will demonstrate how to create a kernel module for a ranging sensor (such as an ultrasonic sensor) on a Linux-based embedded system.
Detailed Explanation
This chunk introduces the focus of the chapter, which is to guide the reader through the process of creating a kernel module specifically designed for a ranging sensor based on Linux systems. Kernel modules are pieces of code that can be loaded into the kernel to extend its functionality, allowing user-space applications to interact with hardware like sensors. Here, the ultrasonic sensor is used as an example, which helps measure distances based on sound waves.
Examples & Analogies
Think of a kernel module like a translator for a foreign language. Just as a translator allows someone to communicate with others who speak a different language, a kernel module enables software to interact effectively with hardware that operates in a different 'language' - the language of the operating system kernel.
Function of the Ranging Sensor
Chapter 2 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
The ranging sensor is commonly used to measure distances by emitting sound waves and measuring the time it takes for the echo to return.
Detailed Explanation
This chunk explains the primary function of the ranging sensor, which is to measure distances using sound waves. It emits a pulse of sound, which travels until it hits an object and bounces back to the sensor. The time taken for the sound to travel to the object and back (known as the round-trip time) is measured and used to calculate the distance, based on the speed of sound in the air.
Examples & Analogies
Imagine throwing a ball against a wall and timing how long it takes for the ball to come back to you. If you know how fast the ball travels, you can easily calculate how far away the wall is. The sensor works in a similar way with sound waves.
Building the Kernel Module
Chapter 3 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
We will build a kernel module that interacts with the sensor hardware, retrieves the distance measurement, and provides an interface for user-space applications to read the sensor data.
Detailed Explanation
In this part, the process of building the kernel module is explained. The module will interface directly with the physical sensor, collect data (distance readings), and then provide that data through an interface, allowing other programs (user-space applications) to utilize those readings. This means that once the kernel module is implemented, users can interact with it easily to access sensor information.
Examples & Analogies
Think of it like creating a smartphone app that connects to a sensor. Just like an app provides a user-friendly interface to check distances measured by a physical device, a kernel module provides a way for the operating system and apps to communicate with the sensor and retrieve its data.
Structure of the Chapter
Chapter 4 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
This chapter will walk through the steps of writing the kernel module, compiling it, and interacting with it from user space.
Detailed Explanation
The final chunk outlines the structure of the chapter, which guides the reader through the entire process: writing the code for the kernel module, compiling it to create an executable, and establishing how to interact with the module from user space. This structured approach is beneficial for learners to follow along step-by-step, ensuring that they grasp each part of the process before moving to the next.
Examples & Analogies
Consider this chapter like a cooking recipe. Just as a recipe details each step to prepare a dish—from gathering ingredients, cooking, to serving—the chapter systematically presents each step involved in creating and using a kernel module for a ranging sensor.
Key Concepts
-
Kernel Module: A software component that extends the capability of the kernel.
-
Ultrasonic Sensor: A sensor used for measuring distance that works on the echo principle.
-
GPIO Pins: Pins on a microcontroller that allow control and interaction with devices.
-
User-Space: The area of memory used by user applications to interact with the operating system.
Examples & Applications
An example of a commonly used ultrasonic sensor is the HC-SR04.
A practical application of kernel modules includes interfacing with hardware to control motors or sensors.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
Sound waves soar, then bounce back more, measuring space as they explore.
Stories
Imagine standing at the end of a long hall. You shout, and hear your echo. That's your ultrasonic sensor taking notes on distance.
Memory Tools
Remember D S G U: Distance, Sound, GPIO, User-space - all key components in our chapter.
Acronyms
Use the acronym 'SOUND' - Sensor, Output, Ultra, Node, Distance.
Flash Cards
Glossary
- Kernel Module
A piece of code that can be loaded and unloaded into the kernel upon demand, enhancing the functionality of the Linux operating system.
- Ultrasonic Sensor
A device that measures distance by emitting high-frequency sound waves and measuring the time it takes for the echo to return.
- GPIO Pins
General Purpose Input/Output pins that can be configured to perform either input or output operations in electronic devices.
- UserSpace
Memory area where user applications run, providing a separation from the kernel space for stability and security.
Reference links
Supplementary resources to enhance your learning experience.