
Writing the Ranging Sensor Kernel Module
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to Kernel Module Basics
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we're going to explore how to write a kernel module that interfaces with a ranging sensor. Can anyone tell me what a kernel module is?

Is it a piece of code that can be loaded into the kernel to extend its functionality?
Exactly! Kernel modules help in adding features like device drivers without needing to reboot the system. They connect user applications with hardware. Who can name a real-world application of this?

Using a sensor to measure distances, like in robotics or automation?
Right! Now, let's get into our specific example of an ultrasonic sensor.
GPIO Pins Initialization
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

In our kernel module, the first step involves initializing the GPIO pins. Can someone remind me what GPIO stands for?

General Purpose Input/Output!
Perfect! We need to ensure these are properly configured before we can read sensor data. What do we do first in the code?

We check if the GPIO pins are valid and then request them.
Correct! This avoids conflicts with other drivers and ensures clean operation. If the pins are invalid, what do we return?
An error code, like -ENODEV!
Distance Measurement Logic
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Next, we need to measure distance. Can anyone tell me the basic concepts involved in using an ultrasonic sensor?
It sends sound waves and measures the time it takes for the echoes to return!
Exactly! We calculate the time taken to echo back and apply the formula. What is the formula for that?
Distance equals time times the speed of sound divided by two!
That's right! Always remember to divide by two since the sound travels to the object and back.
User-Space Interaction
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Now let's talk about how user applications will interact with our kernel module. How can we expose the measured distance?
We can create a device file that user-space programs can read!
Great! This allows programs to access our measurement easily. What function do we use to implement this?
We override the 'read' function to handle the data transfer!
Correct! This way, the user space can simply call 'read' to get the current distance measurement immediately.
Cleaning Up and Unloading the Module
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Finally, once we’re done with the module, we need to ensure we clean up properly. Why is this necessary?
To avoid memory leaks and free the resources we used!
Exactly! We unregister the device and free the GPIO. Can anyone remind us what functions we use?
We use 'gpio_free' for GPIO pins and 'unregister_chrdev' for the device!
Correct! Always maintain good coding hygiene to prevent future issues. Any questions?
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
The section covers the step-by-step process of writing a kernel module for an ultrasonic ranging sensor, including code snippets for initializing GPIO pins, measuring distance, and exposing data to user applications. It emphasizes interaction with the hardware and proper resource management.
Detailed
Writing the Ranging Sensor Kernel Module
This section demonstrates the creation of a kernel module for a ranging sensor (specifically using the HC-SR04 ultrasonic sensor) that is integral to measuring distances in embedded systems. The implementation begins with including necessary headers for GPIO functionality and device management. The core functions outlined include:
-
Initialization of GPIO Pins: Utilizing the
gpio_requestfunction to set up trigger and echo pins for the sensor with appropriate error handling. - Distance Measurement Logic: Detailed performance of sending a pulse to trigger the sensor and using the duration of the echo to compute the distance based on the speed of sound.
- User-Space Interaction: The module will expose the measured distance as a device file, allowing user applications to retrieve this data conveniently.
- Resource Management: Proper cleanup of resources upon module removal to ensure there are no memory leaks or dangling pointers.
The provided code snippets and explanations serve to guide the user in effectively utilizing Linux kernel programming principles to build a practical and efficient sensor interface.
Youtube Videos

Audio Book
Dive deep into the subject with an immersive audiobook experience.
Step 1: Include Necessary Headers
Chapter 1 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
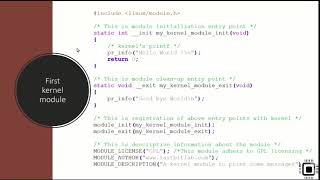
#include#include #include #include #include #include #include #define TRIGGER_PIN 17 // GPIO pin for trigger #define ECHO_PIN 27 // GPIO pin for echo #define DEVICE_NAME "ranging_sensor" // Variables to store device data static int distance = 0; static int major_number;
Detailed Explanation
In this step, we include the necessary header files to access the kernel functions and definitions for our module. Each header file serves a specific purpose:
- #include <linux/module.h>: This allows us to define a kernel module.
- #include <linux/kernel.h>: This is needed for kernel-related functions (like printk).
- #include <linux/init.h>: This is used for initialization functions in modules.
- #include <linux/gpio.h>: This header allows access to GPIO functionality.
- #include <linux/delay.h>: Helps in creating delays in microseconds.
- #include <linux/fs.h>: This includes definitions for file structures needed for device handling.
- #include <linux/uaccess.h>: For transferring data between user space and kernel space.
Additionally, we define constants for the GPIO pins and declare variables to store the distance measurement and the major number for our device.
Examples & Analogies
Think of these header files as the toolbox for a mechanic. Just like a mechanic needs specific tools to fix cars, the kernel module needs these headers to perform specific tasks like handling GPIO and operating the kernel.
Step 2: Initialize the GPIO Pins and Sensor
Chapter 2 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
static int __init sensor_init(void)
{
printk(KERN_INFO "Ranging Sensor Kernel Module: Initializing...\\n");
// Request GPIO pins
if (!gpio_is_valid(TRIGGER_PIN) || !gpio_is_valid(ECHO_PIN)) {
printk(KERN_ERR "Invalid GPIO pins\\n");
return -ENODEV;
}
// Request Trigger Pin
if (gpio_request(TRIGGER_PIN, "Trigger") < 0) {
printk(KERN_ERR "Failed to request Trigger Pin\\n");
return -EBUSY;
}
// Request Echo Pin
if (gpio_request(ECHO_PIN, "Echo") < 0) {
printk(KERN_ERR "Failed to request Echo Pin\\n");
gpio_free(TRIGGER_PIN);
return -EBUSY;
}
// Set GPIO direction (Trigger as output, Echo as input)
gpio_direction_output(TRIGGER_PIN, 0);
gpio_direction_input(ECHO_PIN);
// Register device with major number dynamically assigned
major_number = register_chrdev(0, DEVICE_NAME, &fops);
if (major_number < 0) {
printk(KERN_ERR "Failed to register device\\n");
gpio_free(TRIGGER_PIN);
gpio_free(ECHO_PIN);
return major_number;
}
printk(KERN_INFO "Ranging Sensor Kernel Module: Device registered with major number %d\\n", major_number);
return 0;
}
Detailed Explanation
In this step, we write the initialization function for our kernel module, called sensor_init. The function performs the following tasks:
1. It logs a message indicating that the module is initializing.
2. It checks if the specified GPIO pins are valid.
3. It requests access to the Trigger and Echo pins, and handles any errors if the requests fail.
4. It sets the Trigger pin as an output and the Echo pin as an input to configure them for the sensor.
5. Finally, it registers the device with a dynamic major number. This allows user space to interact with the device. If the registration fails, it frees the GPIO pins and returns an error.
Overall, this step is critical for preparing the sensor for operation.
Examples & Analogies
Consider this step like preparing a bicycle before a race. You need to ensure that all the parts are functioning (like checking the brakes and tires) and making adjustments (like setting the handlebars) before you can start racing.
Step 3: Measuring the Distance
Chapter 3 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
static int measure_distance(void)
{
int duration;
unsigned long start_time, end_time;
// Send a 10us pulse to the Trigger Pin
gpio_set_value(TRIGGER_PIN, 1);
udelay(10); // 10 microseconds
gpio_set_value(TRIGGER_PIN, 0);
// Wait for the Echo Pin to go high (indicating signal return)
start_time = jiffies;
while (gpio_get_value(ECHO_PIN) == 0) {
if (time_after(jiffies, start_time + msecs_to_jiffies(1))) {
return -1; // Timeout if no echo received
}
}
// Measure the duration of the high pulse
start_time = jiffies;
while (gpio_get_value(ECHO_PIN) == 1) {
if (time_after(jiffies, start_time + msecs_to_jiffies(100))) {
return -1; // Timeout if no echo received
}
}
end_time = jiffies;
// Calculate duration in microseconds
duration = jiffies_to_usecs(end_time - start_time);
// Calculate distance in centimeters (based on the speed of sound in air)
distance = duration / 58; // Distance in cm
return 0;
}
Detailed Explanation
This chunk describes how the module measures the distance using the sensor. The measure_distance function does the following:
1. It initializes a variable to store the duration of the echo.
2. It sends a trigger pulse of 10 microseconds to start the sensor measurement.
3. Then it waits for the Echo pin to go high, indicating that the sound wave has bounced back.
4. It measures the duration that the Echo pin stays high, which indicates how long it took for the sound to travel to the object and back.
5. Finally, it calculates the distance using the time measured and the known speed of sound, dividing by 58 to convert to centimeters.
This function is the core functionality of the module by allowing it to convert time into a distance measurement.
Examples & Analogies
Think of measuring distance like using a tape measure. You first stretch the tape out (sending the pulse), wait for it to reflect back from the wall (the echo), and then read the measurement of how far the wall is from you (calculating distance).
Step 4: Reading the Distance from User Space
Chapter 4 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
static ssize_t device_read(struct file *file, char __user *buffer, size_t len, loff_t *offset)
{
char dist_str[10];
int ret;
// Measure the distance
if (measure_distance() < 0) {
printk(KERN_ERR "Failed to measure distance\\n");
return -EIO;
}
// Convert distance to string and copy to user space
snprintf(dist_str, sizeof(dist_str), "%d\\n", distance);
ret = copy_to_user(buffer, dist_str, strlen(dist_str));
if (ret) {
printk(KERN_ERR "Failed to send data to user space\\n");
return -EFAULT;
}
return strlen(dist_str); // Return number of bytes sent to user space
}
Detailed Explanation
This step focuses on how the module provides distance data to user space. The function device_read is designed to:
1. Call the measure_distance function to get the latest distance measurement.
2. Convert that measurement from an integer to a string format.
3. Copy that string back to the user space through the buffer provided.
4. Return the number of bytes sent. If an error occurs at any step, it reports the error via printk and returns an appropriate error code.
This function forms the interface for user applications to receive distance data.
Examples & Analogies
Imagine a mail courier delivering your measuring tape result. The device_read is the courier who measures the distance using a method and then delivers a written report (the string format of distance) back to you.
Step 5: Cleaning Up
Chapter 5 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
static void __exit sensor_exit(void)
{
unregister_chrdev(major_number, DEVICE_NAME); // Unregister device
gpio_free(TRIGGER_PIN); // Free Trigger Pin
gpio_free(ECHO_PIN); // Free Echo Pin
printk(KERN_INFO "Ranging Sensor Kernel Module: Unloaded\\n");
}
module_init(sensor_init);
module_exit(sensor_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Your Name");
MODULE_DESCRIPTION("A simple kernel module for ultrasonic ranging sensor");
Detailed Explanation
In this final step, we define the cleanup process for the module within sensor_exit. The function does the following:
1. It unregisters the character device using the previously assigned major number, which removes the device from the system.
2. It frees the GPIO pins that were used, ensuring there are no resource leaks.
3. It logs a message indicating that the module has been successfully unloaded. The macros module_init and module_exit link the initialization and cleanup functions to the module's lifecycle. These are important for ensuring the module can be loaded and unloaded correctly in the kernel, maintaining system stability.
Examples & Analogies
Think of this cleanup as putting away all the tools and equipment after a project is finished. You want to ensure everything is properly stored (freed) and that your workspace is clean (unregistered) before you leave.
Key Concepts
-
Kernel Module Writing: Learning to develop modules that add functionalities to the Linux kernel.
-
GPIO Initialization: Importance of properly configuring GPIO pins before use.
-
Distance Measurement: Methodology using time of flight of sound to calculate distance.
-
User-Space Interaction: Techniques to expose sensor data to user applications via device files.
-
Resource Cleanup: Essential practices for freeing resources and avoiding memory leaks.
Examples & Applications
An example of using the HC-SR04 sensor to measure the distance to an object based on time of flight of sound waves.
Using the gpio_set_value() function to trigger the ultrasonic sensor.
How to read the value from the echo pin to calculate distance.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
To measure distanc
Reference YouTube Links
Memory Tools
//img.youtube.com/vi/9zvBoYqgjzs/0.jpg" alt="Linux device driver lecture 8 : Writing a kernel module and syntax" style="width:300px;"/>
Linux device driver lecture 8
Memory Tools
//www.youtube.com/watch?v=FVMzwiKCEEY" target="_blank">
Embedded Linux | Configuring The Linux Kernel | Beginners
Memory Tools
//img.youtube.com/vi/iSiyDHobXHA/0.jpg" alt="Linux Device Drivers Development Course for Beginners" style="width:300px;"/>
Linux Device Drivers Development Course for Beginnerse with great precision, send a pulse and count the condition.
Stories
Imagine a brave explorer sending out a sound wave, waiting for it to bounce back so they can know how far away the treasure is!
Memory Tools
Remember the acronym 'DICE': Distance, Input Time, Calculate Echo.
Acronyms
GPIO - General Purpose Input/Output.
Flash Cards
Glossary
- Kernel Module
A piece of code that can be loaded into the kernel to extend its functionality.
- GPIO
General Purpose Input/Output pins used to interface with hardware.
- Echo Pin
The GPIO pin that receives the echo signal from the ranging sensor.
- Trigger Pin
The GPIO pin that sends a short pulse to trigger the sensor measurement.
- Distance Calculation Formula
Distance = (Time * Speed of Sound) / 2
Reference links
Supplementary resources to enhance your learning experience.