
Design of PID Control Circuits
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to PID Control
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we're going to explore PID control circuits. Can anyone tell me what a PID controller is?

Is that the one that combines three different types of control?
Exactly! PID stands for Proportional, Integral, and Derivative. Each part contributes uniquely to system control. Can anyone think of a situation where we'd need all three?

Maybe in temperature control for a furnace?
Great example! Let's remember the acronym PID: 'Predict, Integrate, Direct.' This can help us recall the functions of each part as we dive deeper.
Basic Design of PID Control Circuits
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Now, let's talk about the design of PID control circuits. Can anyone tell me what key components are involved?

Do we use Op-Amps for each control component?
Exactly! We typically use three Op-Amps—one for each control type. Does anyone recall how we calculate the output of a PID controller?

It uses an equation, right? With Kp, Ki, and Kd?
Very good! The equation is \( V_{out}(t) = K_p \times E(t) + K_i \int E(t) dt + K_d \frac{dE(t)}{dt} \). Make sure you remember this structure!
Applications and Importance of PID Control
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Let's wrap up with the applications of PID controllers. Who can give examples of where PID control is used?
It's used in robotics for precise movements.
And in industrial processes for controlling the temperature!
Exactly! PID controllers are vital in many automated systems. Remember the acronym 'PID—Perfect Instability Definer,' as a humorous way to see how they help maintain system stability.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
PID control circuits leverage the strengths of proportional, integral, and derivative control methodologies. This section details the basic design of PID controllers, the fundamental equations used, and their practical applications to achieve efficient control in various systems.
Detailed
Detailed Summary
In modern control systems, the PID (Proportional-Integral-Derivative) controller stands out as a powerful tool for achieving desired performance. By combining three core control strategies, PID controllers can effectively manage complex processes with dynamic behavior. The design of a PID control circuit typically involves three operational amplifiers (Op-Amps) dedicated to each control function: proportional, integral, and derivative.
Key Features of PID Control Circuits:
- Basic Design: A PID controller sums the outputs from the proportional, integral, and derivative segments to produce a comprehensive control output, adjusting to present errors, accumulating past errors, and predicting future errors.
- Key Equation: The core formula governing the operation of a PID controller is given by:
\[ V_{out}(t) = K_p imes E(t) + K_i \times \int E(t) dt + K_d \times \frac{dE(t)}{dt} \]
where:
- \( K_p \) is the proportional gain,
- \( K_i \) is the integral gain,
- \( K_d \) is the derivative gain,
- \( E(t) \) is the error signal.
- Applications: PID controllers find extensive usage in industrial process control, robotics, and precision tasks like temperature regulation, allowing systems to respond accurately to changes and maintain optimal performance.
In conclusion, understanding the design and function of PID control circuits is crucial for engineers and technologists looking to implement automated control systems effectively.
Youtube Videos

Audio Book
Dive deep into the subject with an immersive audiobook experience.
Basic Design of PID Control Circuits
Chapter 1 of 3
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
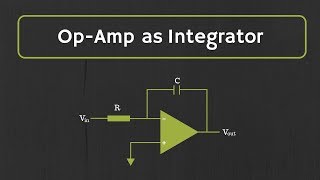
The PID controller combines all three types of control by summing the outputs of a proportional circuit, an integral circuit, and a derivative circuit. A typical PID control circuit uses three Op-Amps for each control function, and the resulting control output is a weighted sum of the three individual components.
Detailed Explanation
A PID controller, which stands for Proportional-Integral-Derivative controller, is essentially an integration of three distinct control methods. Each component (P, I, and D) helps manage the response of a system. The Proportional (P) part reacts to the current error, the Integral (I) part adjusts based on the accumulation of past errors to eliminate residual steady-state errors, and the Derivative (D) part predicts future errors based on the rate of error change. Together, they provide a comprehensive approach to controlling dynamic systems.
Examples & Analogies
Think of a PID controller like a chef preparing a dish, where each component corresponds to a part of the cooking process. The Proportional part is like tasting the dish right now and adjusting the seasoning based on the current flavor (current error). The Integral part is like remembering to add more spice if you've been slowly increasing the heat throughout the cooking process (accumulated errors). Finally, the Derivative part is like observing how quickly the dish is cooking and adjusting the heat accordingly to prevent overcooking (anticipating errors).
Key Equation for PID Control Circuits
Chapter 2 of 3
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Vout(t)=Kp⋅E(t)+Ki⋅∫E(t)dt+Kd⋅dE(t)dt
Where:
○ Kp, Ki, and Kd are the proportional, integral, and derivative gains, respectively.
○ E(t) is the error signal.
Detailed Explanation
The equation represents how the output of a PID controller is calculated. Vout(t) is the output at time t, and it is derived from three components. The first part, Kp⋅E(t), is the proportional contribution, which gives a direct response to the current error. The second part, Ki⋅∫E(t)dt, adds the cumulative effect of the past errors to eliminate steady-state errors, scaled by a constant Ki. Lastly, Kd⋅dE(t)/dt calculates the reaction based on how quickly the error is changing, scaled by Kd. By carefully tuning these gain values (Kp, Ki, Kd), the controller can be made to respond effectively to different types of systems.
Examples & Analogies
Imagine driving a car. The Kp part of the equation represents your immediate reaction to how far you are from the center of the lane (current error). The Ki part can be likened to taking note of how much you’ve been drifting left or right over time (accumulated error), prompting a correction to make sure you stay centered. Finally, the Kd part is like predicting that you need to steer away from the lane’s edge more quickly if you know you're veering off rapidly (rate of change), helping you smooth out your driving.
Applications of PID Control Circuits
Chapter 3 of 3
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
○ Industrial Process Control: Used in automation systems, motor control, and robotics to achieve precise control.
○ Temperature Control: Maintains a desired temperature by adjusting heating or cooling systems based on measured temperatures.
Detailed Explanation
PID control circuits are widely adopted in many industries due to their robustness and effectiveness in managing dynamic processes. In industrial settings, they are essential for tasks like regulating synthesis processes, controlling assembly lines, and operating machinery with precision. In temperature control systems, PID controllers ensure that heating or cooling systems maintain a set level efficiently, responding to fluctuations in temperature without overshooting or oscillating.
Examples & Analogies
Consider a smart thermostat in your home. When you set a temperature (like 72°F), the PID controller ensures that your heating system adjusts accordingly by considering both how warm or cool the house is (current error), how long the house has been too cold (cumulative error), and how quickly the temperature is changing (rate of change). This way, it keeps your home comfortable without the system fluctuating wildly between hot and cold.
Key Concepts
-
PID Controller: Combines proportional, integral, and derivative controls for effective system regulation.
-
Error Signal: The difference between expected and actual outputs, crucial for feedback loops.
-
Control Gains: Parameters Kp, Ki, and Kd that adjust the sensitivity and responsiveness of the PID controller.
Examples & Applications
A PID controller is used in an HVAC system to maintain a set temperature by adjusting heating or cooling outputs as needed.
In an automated conveyor system, a PID controller regulates speed and position based on sensor feedback.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
For PID control, here's the trick: 'Present, past, what's next; fix it quick!'
Stories
Imagine setting a sail on a boat. The Proportional control adjusts the sail based on the current wind, the Integral adjusts for the history of past winds, and the Derivative anticipates the future winds to steer safely.
Memory Tools
To remember PID: "Presents Importantly Directed" signifies how each part affects outcomes.
Acronyms
PID - 'Predict, Integrate, Direct' helps recall its three key functions.
Flash Cards
Glossary
- PID Controller
A control loop feedback mechanism that combines proportional, integral, and derivative control principles.
- Proportional Control (P)
Control that provides an output directly proportional to the current error signal.
- Integral Control (I)
Control that accumulates the error over time to eliminate steady-state error.
- Derivative Control (D)
Control that anticipates future error based on the rate of change of the error signal.
- Error Signal
The difference between the desired setpoint and the actual system output.
Reference links
Supplementary resources to enhance your learning experience.