
Summary of Key Concepts
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Proportional Control
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we're discussing Proportional Control in operational amplifier circuits. Can anyone explain what proportional control means?

It means the output adjusts directly according to the error signal.
Exactly! The output is a multiple of the deviation from the desired value. Remember the equation: Vout = Kp × E(t). What does Kp represent?

Kp is the proportional gain, right?
Correct! This gain determines how responsive our system is to changes in error. Can anyone think of an application for this type of control?

Like regulating the temperature in a heater?
Yes! Great example. To summarize, proportional control is used when output needs to be in direct alignment with the error signal. Let's move to the Integral Control.
Integral Control
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Now, who can explain Integral Control?

Integral Control eliminates steady-state errors by accumulating the error signal over time.
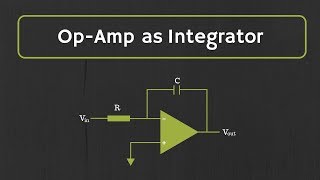
That's right! The output is influenced by the integral of the error, represented by Vout(t)=1/(RC)∫E(t) dt. What do R and C stand for?
R is the resistor and C is the capacitor in the feedback loop.
Well done! Integral control is essential for precision where steady-state errors are unacceptable, like in position control. Any thoughts on how we could apply this practically?
It can be used in robotics to ensure they reach a precise position.
Exactly! Let’s now discuss Derivative Control.
Derivative Control
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
How about Derivative Control? What's its function?
It predicts future errors by monitoring the rate of change of the error signal.
Correct! The derivative term gives us more responsiveness, allowing quick adjustments. The equation here is Vout(t)=−RCdE(t)/dt. Why would we want this in certain systems?
To prevent overshoots and oscillations, especially in fast-moving systems.
Exactly! This control is beneficial in dynamic systems. To wrap up, we must bring all these strategies together in our next topic: PID Control.
PID Control
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
What is the PID Control and why is it crucial?
It's a combination of all three types of control to improve accuracy and stability.
That's correct! The equation is Vout(t)=Kp⋅E(t)+Ki⋅∫E(t)dt+Kd⋅dE(t)/dt. What do Kp, Ki, and Kd signify?
Kp is proportional gain, Ki is integral gain, and Kd is derivative gain.
Well done! Proper tuning of these parameters is key. Can someone summarize why stability is necessary to achieve effective control?
A stable system reacts appropriately without oscillating or overshooting the target value!
Exactly! Great job today, everyone. You’ve all grasped these fundamental control concepts well.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
The key concepts of proportional, integral, derivative, and PID control using operational amplifiers are summarized here. Each strategy plays a unique role in error management, system stability, and performance enhancement in control systems.
Detailed
Summary of Key Concepts
This section synthesizes the core ideas related to the use of operational amplifiers (Op-Amps) in control circuits. The strategies discussed encompass:
- Proportional Control: Directly relates the output to the error signal. Key for systems that need immediate response proportional to the deviation.
- Integral Control: Accumulates past errors over time, effectively eliminating steady-state errors by adjusting the output based on the history of the error.
- Derivative Control: Focuses on predicting future errors by assessing the rate of error change, allowing systems to adjust before errors grow too large.
- PID Control: Merges all three approaches, using proportional, integral, and derivative actions to optimize system response and accuracy.
- Stability and Tuning: Emphasizes the need for proper tuning of PID parameters to achieve desired system performance without causing instability.
Youtube Videos

Audio Book
Dive deep into the subject with an immersive audiobook experience.
Proportional Control
Chapter 1 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Proportional Control: Provides output directly proportional to the error signal, with the control output adjusting based on the size of the error.
Detailed Explanation
Proportional control means that the output of a system adjusts directly in relation to how far the actual output is from the desired output. If there is a large error, the output is adjusted significantly, while a small error results in a small adjustment. This creates a responsive control system, but it may not fully eliminate steady-state errors.
Examples & Analogies
Imagine a driver trying to keep a car at a constant speed. If they notice they are going too fast, they ease off the gas pedal proportionally to their current speed; the harder they are pressing, the more they lift their foot as the speed error increases.
Integral Control
Chapter 2 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Integral Control: Eliminates steady-state errors by accumulating the error over time.
Detailed Explanation
Integral control continuously sums the past errors over time. This cumulative action allows the system to correct offsets that still remain even after proportional control is applied. By focusing not just on the present error but also on how long it has persisted, integral control ensures that steady-state errors are corrected.
Examples & Analogies
Consider a thermostat in a heated room. If the room remains chilly for a long time, the thermostat will keep adjusting the heater more aggressively over time until the desired temperature is reached, compensating for the prolonged error.
Derivative Control
Chapter 3 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Derivative Control: Responds to the rate of change of the error signal, helping to predict future errors and reduce overshoot.
Detailed Explanation
Derivative control anticipates future errors by looking at how quickly the error signal is changing. If the error is increasing rapidly, it makes adjustments to slow down the rate of change, thus preventing overshoot and stabilizing the system. This predictive nature is crucial in dynamic systems.
Examples & Analogies
Think of a car driver who sees the road incline ahead. By noticing the incline, the driver starts to slow down before the car begins to speed up significantly, preventing a sudden jerk and maintaining comfortable control of the vehicle.
PID Control
Chapter 4 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
PID Control: Combines proportional, integral, and derivative control to provide comprehensive feedback for precise control in dynamic systems.
Detailed Explanation
PID control integrates the strengths of proportional, integral, and derivative controls into a unified approach. This combination allows the system to respond effectively to immediate error (Proportional), eliminate steady-state errors (Integral), and predict future errors to reduce overshooting (Derivative). This results in robust and precise control, particularly in complex processes.
Examples & Analogies
Imagine a chef trying to make the perfect dish. He tastes the dish (Proportional), adds spices over time to adjust for balance (Integral), and anticipates if it will become too spicy or bland based on current trends (Derivative) to create a perfect flavor profile.
Stability and Tuning
Chapter 5 of 5
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Stability and Tuning: Proper tuning of PID parameters is essential for achieving the desired performance without instability.
Detailed Explanation
To achieve optimal performance in a PID control system, it is crucial to properly adjust the parameters (Kp for proportional gain, Ki for integral gain, and Kd for derivative gain). If these gains are not tuned correctly, the system may become unstable, leading to oscillations or overshooting the desired setpoint. Thus, careful tuning ensures a balance between responsiveness and stability.
Examples & Analogies
Think of fine-tuning a musical instrument. Just as a musician adjusts the tension of strings to ensure the right pitch, an engineer adjusts the PID parameters to find the perfect balance that keeps the system stable while responding appropriately to changes.
Key Concepts
-
Proportional Control: Provides immediate response based on current error.
-
Integral Control: Eliminates long-term errors by accumulating past errors.
-
Derivative Control: Adjusts based on the rate of error changing.
-
PID Control: Combines P, I, and D controls for improved system response.
-
Stability: Important for system performance and reliability.
Examples & Applications
Using proportional control in an air conditioning system to maintain desired temperature.
Applying integral control in a robotic arm to ensure accurate positioning over time.
Implementing derivative control in a motor to smooth out speed changes and reduce shaking during acceleration.
Combining proportional, integral, and derivative controls for CNC machines to achieve precise cutting.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
PID is the way to manage, past, present, future, don't miss the advantage!
Stories
Imagine a chef adjusting the seasoning not just by taste (P), remembering the adjustments made before (I), and anticipating how the dish will taste after cooking (D). This blend perfectly seasons every dish.
Memory Tools
To remember PID order, think of 'Please Integrate Details' for Proportional, Integral, and Derivative.
Acronyms
PID
'Presents Immediate Direction
helping quickly adjust control systems.
Flash Cards
Glossary
- Proportional Control
A control strategy where the output is directly proportional to the error signal.
- Integral Control
A control approach that eliminates steady-state errors by integrating the error over time.
- Derivative Control
A control method that reacts to the rate of change of the error signal to predict future errors.
- PID Control
A control strategy that combines proportional, integral, and derivative controls for comprehensive system regulation.
- Stability
The ability of a control system to maintain its behavior without oscillations or divergence.
- Tuning
The adjustment of control parameters to achieve optimal system performance.
Reference links
Supplementary resources to enhance your learning experience.