
Best Approximation in Inner Product Spaces
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Concept of Best Approximation
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we will talk about the concept of best approximation in inner product spaces. Why do you think approximation is important?

It's important to minimize errors when we are working with data or making calculations.
Exactly! We often need to find the closest vector in a subspace to minimize error. Does anyone know how we would define that mathematically?

Is it related to the norm of the difference between vectors?
Yes! The best approximation v_b is defined by the equation ∥v − v_b∥ = min(∥v − w∥) where w is any vector in the subspace W. This means we are looking for the vector w in W that gets us closest to v.
Understanding the Projection Theorem
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Moving forward, let's discuss the Projection Theorem. What does the theorem state about the relationship between the error vector and the subspace?

I think it says that the error vector is orthogonal to the subspace?
That's correct! The theorem highlights that v − v_b is orthogonal to W, meaning the error lies in the orthogonal complement. Why do you think this is useful?

It helps us ensure our approximation is as accurate as possible!
Precisely! This principle is foundational for the Least Squares Method we use in optimization. Can anyone explain why maintaining orthogonality is crucial here?
It minimizes the mean square error, right?
Exactly! Great connections everyone!
Applications in Engineering
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Now let's connect this discussion to its applications in engineering. How might the idea of best approximation apply in Civil Engineering?
I think it’s crucial in design optimization and fitting data to models.
Absolutely! The goal is to ensure our engineering designs are both efficient and effective based on the best available data.
So when we're running simulations, we want that approximation to fit the boundary conditions as well.
Exactly, simulations rely heavily on these approximations! To conclude, can someone summarize why the best approximation is essential?
It helps minimize errors and ensure we have the best possible data fit in our engineering applications!
Well summarised!
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
In inner product spaces, particularly in large or infinite-dimensional spaces, best approximation refers to finding the closest vector in a subspace to a given vector in the entire space. The projection theorem is central to this concept, stating that the error between the vector and its approximation lies in the orthogonal complement of the subspace, which is crucial in engineering applications such as least squares methods for optimization.
Detailed
Best Approximation in Inner Product Spaces
In various engineering scenarios, especially when dealing with large or infinite-dimensional spaces like function spaces, the notion of approximation becomes vital. This section defines the concept of best approximation, denoting the closest vector from a subspace, reducing the error in approximation.
Definition
Let V represent an inner product space and W be a subspace of V. The best approximation, denoted as v_b, to a vector v in V is defined by minimizing the length of the error vector:
∥v − v_b∥ = min(∥v − w∥)
where w ∈ W.
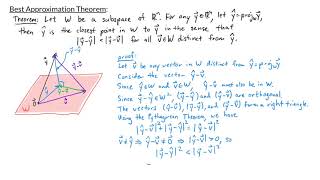
Theorem: Projection Theorem
This theorem states that the best approximation, v_b, lies such that the vector error (v − v_b) is orthogonal to all vectors in the subspace W. Formally, this is expressed as:
v − v_b ⊥ W
This foundational concept underlies the Least Squares Method, which is extensively utilized in Civil Engineering for various tasks like design optimization and data fitting. Recognizing and applying this principle forms a cornerstone in numerical methods for error minimization in simulations.
Youtube Videos


![Inner Product [dark version]](https://img.youtube.com/vi/0bkaijNDOzc/mqdefault.jpg)



Audio Book
Dive deep into the subject with an immersive audiobook experience.
Introduction to Best Approximation
Chapter 1 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
In many engineering problems, especially involving large or infinite-dimensional spaces (like function spaces), we often seek an approximation of a vector v by another vector v from a subspace W ⊂V, such that the approximation is best in terms of minimum error.
Detailed Explanation
This chunk introduces the concept of best approximation in inner product spaces. In engineering, especially when dealing with complex problems involving infinite-dimensional spaces, we frequently need to find a vector that closely approximates another vector while lying within a certain subspace. The goal isn't just any approximation, but the best one, which minimizes the error between the original vector and the approximate vector. Here, the 'error' refers to the difference in measurement of the vectors' lengths or directions, aiming to reduce this difference as much as possible.
Examples & Analogies
Imagine a sculptor trying to carve a statue from a large block of marble. The sculptor needs to remove as little material as possible while still achieving the desired shape. The original block of marble represents the vector v, and the final statue symbolizes the best approximation v in the subspace. Just as the sculptor aims for the closest fit with minimal waste, we seek to find the vector in our subspace that is as close as possible to our original vector with minimal error.
Definition of Best Approximation
Chapter 2 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Let V be an inner product space and W ⊂ V be a subspace. The best approximation v ∈W to a vector v ∈V is defined as:
∥v−v ∥= min ∥v−w ∥
w∈W.
Detailed Explanation
This definition mathematically expresses how we find the best approximation of a vector v from a subspace W. In this formula, we calculate the length of the difference between the original vector v and the approximated vector v, and we want this distance (error) to be as small as possible. The notation 'min' indicates that we are looking for the smallest distance across all vectors w that belong to the subspace W. In simpler terms, we are looking for the nearest point in our subspace that can represent our original vector.
Examples & Analogies
Consider a person trying to park their car in a parking lot. The car represents the vector v, the various parking spaces represent different vectors w within the subspace W. The goal is to park in a space where the car fits best with the least amount of distance to travel to get to a perfect parking position. The closer the distance to the perfect spot, the better the parking job.
Projection Theorem
Chapter 3 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Theorem (Projection Theorem): The best approximation v ∈W satisfies:
v−v ⊥W
That is, the error vector lies in the orthogonal complement W⊥.
Detailed Explanation
The Projection Theorem tells us that the difference between the original vector v and the best approximation vector v is orthogonal to the subspace W. This means that if we draw the vector that represents the error (v - v), it will be at right angles to all vectors in the subspace W. This is important because the orthogonality indicates that we cannot reduce the error further by adjusting our approximation within that subspace; hence, we have found the best approximation. This principle is essential in numerous applications, notably in the Least Squares Method.
Examples & Analogies
Think about throwing a ball towards a target on a wall. If the ball hits the wall at an angle such that the wall acts like the subspace W, the shortest distance between the ball's trajectory and the target would be the perpendicular hit point. This point represents the best approximation of where the ball should have landed if it were to hit directly at the target, minimizing the error of its landing spot.
Applications in Civil Engineering
Chapter 4 of 4
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
This principle forms the mathematical basis of the Least Squares Method, extensively used in Civil Engineering design optimization, data fitting, and structural simulations.
Detailed Explanation
The best approximation's concept directly applies to many practical problems in Civil Engineering, particularly in methods like the Least Squares Method. This method is crucial for tasks such as optimizing design parameters, fitting data collected from experiments, and simulating structures to ensure they can withstand the forces they will encounter. The idea is to minimize discrepancies between observed and predicted data, allowing engineers to make informed decisions based on the best available approximations of their models.
Examples & Analogies
Imagine an engineer analyzing various designs of a bridge. They collect data on stresses and strains from previous designs and compare those with new proposed designs. By applying the Least Squares Method, they can find a design that best approximates these stresses and minimizes potential issues, much like a tailor adjusting fabric to fit perfectly on a mannequin. This ensures the bridge will perform safely and effectively under real-world conditions.
Key Concepts
-
Approximation: The process of finding the closest representation of a vector in a subspace.
-
Error Vector: The difference between the vector and its approximation, essential in evaluating how well the approximation fits.
-
Projection Theorem: A vital theorem articulating the conditions under which approximations are deemed optimal.
Examples & Applications
In a structural engineering scenario, if a load vector represents applied forces and a subspace is defined by allowable material stresses, the best approximation helps in designing safe and effective structures.
In data fitting scenarios, when you have observed data points, using least squares to find the best approximation minimizes the discrepancies between actual data points and the model's predictions.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
To find the best in a quest, minimize errors, do the rest.
Stories
Imagine you are an architect selecting the perfect fit for a building. You must choose the design that minimizes the strain and maximizes the safety, like finding the best approximation in a mathematical space.
Memory Tools
Remember P.E.F. - Projection for Error Free approximation, helps to remember the concepts required for optimizing models.
Acronyms
B.A.P. - Best Approximation Principle, a clear way to identify the goal of minimizing error through projection.
Flash Cards
Glossary
- Best Approximation
The closest vector v_b in a subspace W that minimizes the error with respect to a vector v in the overall space V.
- Projection Theorem
The theorem stating that the error vector v − v_b is orthogonal to every vector in the subspace W.
- Orthogonal Complement
The set of vectors in an inner product space that are orthogonal to every vector in a given subspace W.
- Least Squares Method
A mathematical technique used to find the best fit by minimizing the sum of the squares of the residuals.
Reference links
Supplementary resources to enhance your learning experience.