
Forward and Inverse Kinematics
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to Kinematics
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Welcome everyone! Today, we're diving into the exciting world of kinematics in robotics. Can anyone tell me what kinematics studies?

Isn't it about how things move?
Exactly, Student_1! Kinematics focuses on motion without considering the forces behind it. Now, in robotics, we primarily deal with two aspects: forward kinematics and inverse kinematics. Can anyone define these?

Forward kinematics computes the end-effector position based on joint parameters, right?
Correct! And what about inverse kinematics?

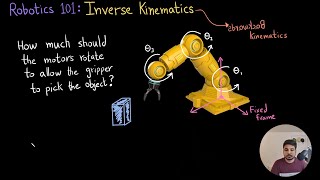
That's about figuring out the joint parameters needed to reach a certain position.
Right again! Remember: FK is like getting to a destination with a map; you know where to end up. IK is determining how to adjust your path to reach that destination.
In fact, we can use the acronym FIK (Forward = Find, Inverse = Inquire) to help us remember their functions. Who can tell me why IK is often more complex?

Because there can be multiple solutions depending on the robot’s configuration.
Exactly! Great participation, everyone. Kinematics is crucial for robotic applications like construction and inspection. Let’s summarize: FK tells us where to go, and IK helps us find the way to get there.
Exploring Forward Kinematics
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Now let’s dive deeper into forward kinematics using something called Denavit-Hartenberg parameters. Who can remind us of what these parameters are?
They include parameters like angles, offsets, lengths, and twists!
That's right! These are crucial for establishing a standardized way to represent our robot's joints and links. Can anyone explain how we use these parameters to form transformation matrices?
We combine the D-H parameters in mathematical formulas to get a transformation matrix, right?
Yes! And this matrix helps us understand the end-effector's final position and orientation. If we multiply these transformation matrices together, we can compute the overall transformation from base to end-effector.
Can you give us an example?
Sure! If we have a 2-link robot, we can set up matrices for each joint and multiply them to find the position. Always remember: in FK, we start with joint variables to compute where we end up.
Let's wrap up. Today, we learned that FK uses D-H parameters to define motion, allowing us to locate the end-effector based on joint settings.
Inverse Kinematics and Its Complexity
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Next, let’s discuss inverse kinematics in detail. Why do you think it's needed in robotics?
To find out how to adjust the joints to reach a specific point.
Exactly! Now, the IK problem can be quite complex. Can anyone summarize why we might have one solution, multiple solutions, or even no solution?
It depends on the robot configuration; sometimes there are multiple ways to achieve the same endpoint.
Very good! And what about constraints? Why do we need to consider them?
Because of joint limits, obstacles, and sometimes the robot just can't move in certain configurations.
Exactly! Constraints are crucial for ensuring the robot operates safely and effectively in the environment. When considering numerical methods, can anyone name one?
The Newton-Raphson method?
Correct! Today we explored how IK provides the joint configurations needed to achieve our robotic tasks, despite the challenges it entails.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
Kinematics is the study of motion in robotics that deals with the position and orientation of robotic components. This section introduces forward kinematics (FK) for determining end-effector position from joint parameters and inverse kinematics (IK) for deducing joint parameters from desired end-effector positions, highlighting their significance in various robotic applications.
Detailed
Forward and Inverse Kinematics
Overview of Kinematics
Kinematics is fundamentally about motion analysis without accounting for the forces driving it. In robotics, it plays a vital role in determining how robots can accurately position and orient their end-effectors during operations such as construction and inspection.
Key Kinematic Problems
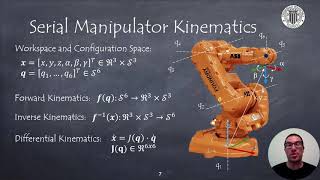
Forward Kinematics (FK)
FK allows us to compute the end-effector's position and orientation when joint parameters are known—a vital function in robotic tasks like 3D printing and welding.
Inverse Kinematics (IK)
Conversely, IK solves the problem of determining the necessary joint parameters to achieve a desired pose of the end-effector, which is paramount in extensive applications, including automated machinery.
Understanding Kinematic Concepts
- Degrees of Freedom (DOF): Identifies the number of independent movements for a robot.
- Kinematic Chains: Describes the links and joints that form a manipulator.
- Joint Types: Includes revolute (rotational) and prismatic (translational) joints, each contributing differently to motion.
Detailed FK using Denavit-Hartenberg (D-H) Parameters
The D-H convention is a standardized method that simplifies the FK calculations through defined parameters:
- θ (theta): Joint angle
- d: Link offset
- a: Link length
- α (alpha): Link twist
The FK is facilitated by transformation matrices, computed through matrix multiplication, leading to the overall description of the end-effector's position and orientation.
Inverse Kinematics Challenges
IK can be more complex since it may yield multiple solutions depending on the manipulator's configuration. It employs techniques like analytical solutions for simpler arms and numerical methods for complexities, focusing on finding solutions that adhere to constraints like joint limits and collision avoidance.
The Role of the Jacobian Matrix
The Jacobian relates joint velocities to end-effector velocities, critical for enabling effective motion control in applications. Singularities in the Jacobian need careful treatment as they can lead to loss of control.
This section ultimately highlights the practical implications of both FK and IK in civil engineering applications, emphasizing their importance for tasks in robotics that require precision and reliability.
Youtube Videos

Audio Book
Dive deep into the subject with an immersive audiobook experience.
Introduction to Kinematics
Chapter 1 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Kinematics is the study of motion without considering the forces that cause it. In the field of robotics, kinematics forms the foundation for understanding and controlling the position and orientation of a robot's end-effector. It is particularly important in manipulator-type robots, which are common in civil engineering applications such as automated construction, bricklaying robots, and bridge inspection arms.
Detailed Explanation
Kinematics relates to how things move without talking about why they are moving. In robotics, understanding kinematics helps to control where a robot's tools or hands, called end-effectors, are positioned and oriented. This knowledge is important for robots that perform tasks in construction or inspection, allowing them to move accurately and effectively.
Examples & Analogies
Think of kinematics like driving a car. You need to know the position of the car on the road (like the end-effector of a robot) and how to navigate it to reach your destination. Just as you don’t have to worry about why the car moves (the mechanics), kinematics lets robots move without focusing on the forces involved.
Forward Kinematics (FK)
Chapter 2 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Forward Kinematics (FK) involves calculating the position and orientation of the robot’s end-effector using the known joint parameters.
Detailed Explanation
Forward Kinematics is a process where we use specific values from a robot’s joints (which can bend or slide) to figure out where the robot’s end-effector is located in space. These values are crucial in determining how the robot should position itself for specific tasks or actions.
Examples & Analogies
Imagine a human arm. If you know how far the shoulder can rotate and the angle of the elbow, you can visualize where your hand will be positioned. Similarly, FK helps to identify how changes in joint angles affect the location of the end-effector.
Inverse Kinematics (IK)
Chapter 3 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Inverse Kinematics (IK) is the process of finding the joint parameters that achieve a specific end-effector pose (position and orientation).
Detailed Explanation
Inverse Kinematics works backward; given a desired position and orientation for the end-effector, it computes the necessary joint movements to reach that position. This is important for robots that need to perform precise actions based on the location they need to reach.
Examples & Analogies
Think of playing a game of darts where you want to hit a specific target. You need to calculate the right angles of your elbow and wrist (the joints) to throw the dart accurately. IK helps robots calculate how to position their joints to 'hit' their targets.
Types of Solutions in IK
Chapter 4 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
IK may have multiple, one, or no solution. For example, a 6-DOF manipulator can have up to 16 valid configurations. Redundancy (more than 6 DOF) leads to infinite solutions.
Detailed Explanation
When solving for the joint angles needed to achieve a certain position, there could be many ways to do it. In some cases, like with a robot with six degrees of freedom (DOF), multiple solutions exist for the same end-effector position because the robot can bend in different ways to achieve it. When a robot has more joints than required, it can create even more options for movement.
Examples & Analogies
Imagine a person trying to reach a cookie jar on a high shelf. They could stand on their tiptoes, use a stool, or stretch their arm in various ways to get to the cookies. Similarly, a robot can use different joint configurations to achieve the same endpoint.
Jacobian Matrix in Kinematics
Chapter 5 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
The Jacobian matrix (J) relates the joint velocities to the end-effector linear and angular velocities.
Detailed Explanation
The Jacobian matrix is a mathematical tool that connects how fast the robot's joints are moving to how fast the end-effector is moving. It plays a crucial role in understanding how changes in joint movement will affect the robot’s overall motion in space.
Examples & Analogies
Think of the Jacobian like the gears in a bicycle. Just like different gears affect how fast the pedals turn and how fast the bike moves, the Jacobian helps relate how joint movements (the pedals) influence the speed and direction of the end-effector (the bike).
Constraints in Inverse Kinematics
Chapter 6 of 6
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Constraints in IK include physical constraints such as joint limits, workspace boundaries, collision avoidance, and singularities.
Detailed Explanation
When solving for the joint angles in IK, there are several limitations to consider. These constraints may include the maximum and minimum angles a joint can rotate, the spatial limits within which a robot can operate, the need to avoid bumping into obstacles, and specific configurations that are impractical for control.
Examples & Analogies
Think of a basketball player trying to shoot a basket. They can only stretch to a specific height and angle (the constraints). If they try to jump too high and miss the basket, it's similar to how a robot might fail to achieve certain positions due to joint limits or obstacles.
Key Concepts
-
Degrees of Freedom (DOF): Identifies the number of independent movements in a robot.
-
Forward Kinematics (FK): Calculates the end-effector's position from joint angles.
-
Inverse Kinematics (IK): Determines joint angles needed to achieve a desired pose.
-
Denavit-Hartenberg Parameters: Standardized parameters that simplify FK calculations.
-
Jacobian Matrix: Connects joint velocities to end-effector velocities.
Examples & Applications
A robotic arm uses FK to go from a position of (0, 0) to (2, 3) based on specific joint angles.
When using IK, a robotic arm must find its joint angles to reach a location where a brick needs to be placed.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
Forward finds where to go, Inverse tells how to flow.
Stories
Imagine a robot named Robby who wanted to reach a high shelf. Through 'FK', he found out where to extend his arm, but when he faced a crowded room, he used 'IK' to decide how to avoid bumping into things.
Memory Tools
To remember the D-H parameters: Think 'TALD' - Theta, Alpha, Link length, Distance.
Acronyms
Use FIK to remember Forward = Find, Inverse = Inquire.
Flash Cards
Glossary
- Forward Kinematics (FK)
The process of calculating the position and orientation of a robot's end-effector based on known joint parameters.
- Inverse Kinematics (IK)
The method used to determine the joint parameters that achieve a desired position and orientation of the end-effector.
- Degrees of Freedom (DOF)
The number of independent joint variables needed to fully specify the configuration of a robot.
- DenavitHartenberg Parameters
A standardized convention for assigning coordinate frames for robotic links to facilitate kinematic analysis.
- Jacobian Matrix
A matrix that relates joint velocities to the end-effector's linear and angular velocities.
- Singularity
A configuration that leads to a loss of control or inability to move in certain directions.
- Kinematic Chain
A series of interconnected links and joints forming a manipulator.
Reference links
Supplementary resources to enhance your learning experience.