
Trajectory Planning in Joint and Cartesian Space
Enroll to start learning
You’ve not yet enrolled in this course. Please enroll for free to listen to audio lessons, classroom podcasts and take practice test.
Interactive Audio Lesson
Listen to a student-teacher conversation explaining the topic in a relatable way.
Introduction to Trajectory Planning
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Today, we will discuss trajectory planning in robotics, which is crucial for precisely guiding a robot from one position to another.

Is trajectory planning only about the paths the robot takes?
Good question! It's not just about paths; it's also about how smoothly and safely a robot can move, which depends on both joint and Cartesian space planning.

What’s the difference between joint and Cartesian space trajectory planning?
Joint space trajectory focuses on how the robot's joints move while Cartesian space trajectory emphasizes the end-effector's position in physical space.

So, which one is usually easier to manage?
Joint space is typically easier as it directly deals with joint parameters, but Cartesian provides a more intuitive understanding for specific tasks.
Joint Space Trajectory
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson

Let’s look more closely at joint space trajectory. This approach adjusts joint parameters to create movement. Think of using linear or cubic polynomials for smoother transitions.

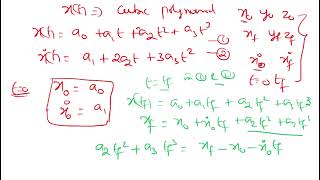
Can you explain how a cubic polynomial works for trajectory planning?
Absolutely! Cubic polynomials ensure a smooth acceleration and deceleration by creating a continuous path that minimizes jerk, enhancing overall motion quality.
What factors do we consider when creating these trajectories?
We look at ease of calculation and the desired motion profiles, like trapezoidal velocity, to regulate speed through the path.
Cartesian Space Trajectory
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Now let's delve into Cartesian space trajectories, which are vital for tasks like painting and 3D printing. Here we track movement through specific coordinates.
Why do we need inverse kinematics for Cartesian trajectories?
Great question! Inverse kinematics translates the Cartesian coordinates into the necessary joint configurations for the robot to achieve that position.
Are there challenges with Cartesian trajectories?
Yes, especially the computational load at each time step; it can be demanding, but it's crucial for high precision tasks.
Can you give an example of where Cartesian space is particularly useful?
Absolutely! In welding applications, where a specific angle and position is required for weld quality, Cartesian space trajectory is essential.
Comparing Joint and Cartesian Space Trajectories
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
Let’s compare joint and Cartesian space trajectories. Both have their advantages. Joint space is easier and often sufficient for simpler systems.
And Cartesian space is more intuitive for certain applications, right?
Exactly! But remember, Cartesian planning often requires more computational resources to deal with inverse kinematics.
Is there a specific scenario where one is chosen over the other?
Yes, for instance, in 3D printing tasks where precise placement matters, Cartesian space is often favored, while simpler robot arms might effectively utilize joint space.
Practical Applications
🔒 Unlock Audio Lesson
Sign up and enroll to listen to this audio lesson
In industrial applications like welding or painting, understanding both trajectory types helps improve efficiency and accuracy.
Do both types work together in some applications?
Absolutely! Many robotic systems use joint space to calculate initial poses before transitioning into Cartesian space for refined movements, especially in precision tasks.
What would be a good exercise to reinforce what we learned today?
You could create a simple motion plan for a robotic arm where you define both joint and Cartesian trajectories for a specific task.
Introduction & Overview
Read summaries of the section's main ideas at different levels of detail.
Quick Overview
Standard
This section explores trajectory planning for robotic movements, detailing both joint space trajectories, which involve changes in joint parameters, and Cartesian space trajectories, which track end-effector movement in Cartesian coordinates. The significance of both types is highlighted in applications such as welding and 3D printing.
Detailed
Trajectory Planning in Joint and Cartesian Space
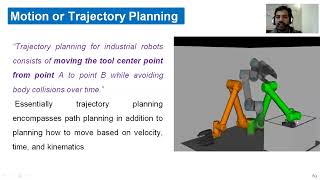
Trajectory planning is essential for achieving smooth, safe, and precise movements of robotic systems from point A to point B. In this section, we discuss two forms of trajectory planning: Joint Space Trajectory and Cartesian Space Trajectory.
Joint Space Trajectory
- This approach involves planning movements based on changes in joint parameters.
- It is generally easier to compute and manage, involving common profiles for movement such as linear interpolation, cubic polynomial paths, and trapezoidal velocity profiles.
- These profiles help in smooth transitions and careful control of the robot's motion.
Cartesian Space Trajectory
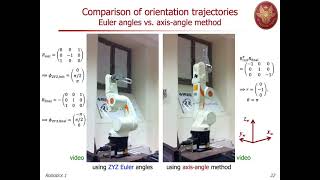
- This planning method focuses on defining the motion of the end-effector in terms of its Cartesian coordinates (x, y, z, and orientation).
- While providing an intuitive way to dictate movement for specific tasks (like welding or painting), it requires solving inverse kinematics at each time step to determine necessary joint adjustments.
- This is particularly important for tasks demanding high precision, such as 3D printing where the robot must adhere to exact paths.
Youtube Videos




Audio Book
Dive deep into the subject with an immersive audiobook experience.
Overview of Trajectory Planning
Chapter 1 of 3
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
Trajectory planning ensures smooth, safe, and precise motion from one point to another.
Detailed Explanation
Trajectory planning is fundamental in robotics because it defines how a robot moves from its current position to a target position. It focuses on creating a path that is not only efficient but also safe for the robot and its environment. In essence, it’s about determining the steps the robot needs to take to reach its goal smoothly and accurately.
Examples & Analogies
Imagine a delivery drone flying from one house to another. The drone must carefully plan its route to avoid obstacles like trees and power lines, ensuring it arrives safely without sudden jerks or abrupt stops. Similarly, robots must plan their movements using trajectory planning.
Joint Space Trajectory
Chapter 2 of 3
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
10.10.1 Joint Space Trajectory
- Plans the motion as changes in joint parameters.
- Easier to compute but less intuitive.
- Common profiles:
- Linear interpolation
- Cubic polynomial
- Trapezoidal velocity
Detailed Explanation
Joint space trajectory planning involves defining the motion of a robot in terms of its joint angles or positions. This means instead of planning where the end of the robot will go, we’re determining how the individual joints will move. While this method is mathematically simpler and faster to compute, it can sometimes result in less natural movements, which may not align with how we visualize the robot’s end-effector movement.
Examples & Analogies
Think about a person raising their arm. Instead of thinking about where their hand will go, they might focus on bending their elbow and shoulder. This is like joint space trajectory: focusing on the joint movements rather than the end position.
Cartesian Space Trajectory
Chapter 3 of 3
🔒 Unlock Audio Chapter
Sign up and enroll to access the full audio experience
Chapter Content
10.10.2 Cartesian Space Trajectory
- Plans the motion in end-effector coordinates (x, y, z, orientation).
- Requires inverse kinematics at each time step.
- Often used in welding, painting, and 3D printing tasks.
Detailed Explanation
In contrast to joint space trajectory planning, Cartesian space trajectory planning focuses on moving the end-effector (the working part of the robot) in a 3D coordinate system (x, y, z), including its orientation. This method is usually more intuitive because it allows the robot to move as expected in the task’s spatial context. However, each adjustment in the end-effector's position might require recalculating the necessary joint angles using inverse kinematics, making it computationally more intensive.
Examples & Analogies
Consider an artist using a robotic arm to paint a mural. The artist can specify exactly where the brush should go on the wall (Cartesian space). However, the robot must figure out how to position its joints to make that happen, similar to how a human artist adjusts their body to reach different parts of the wall.
Key Concepts
-
Trajectory Planning: The method of calculating a smooth path for robot movement.
-
Joint Space Trajectory: A form of trajectory planning focused on joint movement changes.
-
Cartesian Space Trajectory: A form of trajectory planning targeting the robot's end-effector positions in x, y, z coordinates.
Examples & Applications
In a robotic arm operating for welding, a Cartesian space trajectory would plan the exact position and orientation needed for the weld tip.
For a joint space trajectory, a simple robotic arm would pivot its joints from one angle to another smoothly to position itself to pick an object.
Memory Aids
Interactive tools to help you remember key concepts
Rhymes
In joint space we bend and twist, coordinates come into the mist; in Cartesian space we aim straight and true, plotting paths and not just a view.
Stories
Imagine a robot artist painting on a canvas. It smoothly moves its arm (joint space) to create art while carefully positioning the brush at each point (Cartesian space) to ensure the picture comes out beautifully.
Memory Tools
For the types of trajectory planning, remember 'J-C': Joint first for joints, then Cartesian for space.
Acronyms
For **J**oint and **C**artesian, remember **J-C** for planning paths.
Flash Cards
Glossary
- Trajectory Planning
The process of determining the path and movements of a robot in space.
- Joint Space
The space represented by the robot's joint variables and configurations.
- Cartesian Space
The three-dimensional space defined by Cartesian coordinates (x, y, z) in which the robot's end effector operates.
- Linear Interpolation
A method for calculating intermediate values between two known values in trajectory planning.
- Cubic Polynomial
A mathematical expression used for creating smooth motion paths in trajectory planning.
- Trapezoidal Velocity Profile
A motion profile where velocity ramps up and down, forming a trapezoidal shape on a graph of velocity over time.
Reference links
Supplementary resources to enhance your learning experience.